EP1925262A1 - System and method for navigating a surgical needle toward an organ of the body of a patient - Google Patents
System and method for navigating a surgical needle toward an organ of the body of a patient Download PDFInfo
- Publication number
- EP1925262A1 EP1925262A1 EP07121648A EP07121648A EP1925262A1 EP 1925262 A1 EP1925262 A1 EP 1925262A1 EP 07121648 A EP07121648 A EP 07121648A EP 07121648 A EP07121648 A EP 07121648A EP 1925262 A1 EP1925262 A1 EP 1925262A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- mps
- surgical needle
- removable mandrel
- sensor
- target organ
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/0045—Devices for taking samples of body liquids
- A61B10/0048—Devices for taking samples of body liquids for taking amniotic fluid samples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/00336—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means with a protective sleeve, e.g. retractable or slidable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
Definitions
- a system for navigating a surgical needle toward a target organ of the body of a patient includes a removable mandrel, a medical positioning system (MPS) sensor, an electromagnetic field generator, and an MPS.
- the removable mandrel is located within the surgical needle.
- the removable mandrel can be moved in and moved out of the surgical needle.
- the MPS sensor is located at the tip of the removable mandrel.
- Processor 180 is coupled with electromagnetic field generator 166, display 176, image source 178, and with ADC 182.
- Receiver 164 is coupled with ADC 182.
- MPS sensor unit 172 is coupled with the tip of removable mandrel 170 in a similar manner of coupling of MPS sensor unit 110 with removable mandrel 108, as described herein above in connection with Figure 1 .
- Transmitter 168 is coupled with receiver 164 by a wireless link, such as Bluetooth, WiFi, Zigbee, IEEE 802 series connections, and the like.
- Transmitter 168 is physically coupled with removable mandrel 170 and with MPS sensor unit 172, and electrically coupled with the MPS sensor. Transmitter 168 is located at the tip of removable mandrel 170. In this case, removable mandrel 170 is in the form of a solid rod. Alternatively, transmitter 168 is located at a proximal end of the removable mandrel, in which case the transmitter is coupled with the MPS sensor by a pair of wires which pass through a bore of the removable mandrel. Further alternatively, transmitter 168 can be integrated with MPS sensor unit 172. System 160 operates similar to system 100, except that the MPS sensor is coupled with MPS 162 by a wireless link.
Abstract
Description
- The disclosed technique relates to medical devices in general, and to methods and systems for withdrawal of a fluid sample from the body of a patient, in particular.
- In order to diagnose a disease in a patient, a sample of an organic substance, such as a tissue or amniotic fluid is removed from the body of the patient. In case of a solid substance, such as a target tissue, the sample is removed from the body, by employing a biopsy needle. The biopsy needle includes a receptacle to remove the sample. In case of a fluid, such as amniotic fluid, a surgical needle is inserted into the uterus cavity of the uterus of the patient, and a sample of the amniotic fluid is pumped out through a lumen of the surgical needle. The mucous membrane of the vesical surface of the uterus cavity can block the opening of the surgical needle, while the surgical needle passes through the vesical surface to enter the uterus cavity.
- A mandrel is inserted in the lumen, when the surgical needle is inserted into the body of the patient, in order to block the opening of the surgical needle, and to prevent entry of undesired tissues and fluids, into the lumen, and thereby prevent contamination of the sample. When the tip of the surgical needle reaches the desired location within the uterus cavity, the mandrel is pulled out of the lumen, and the sample of the amniotic fluid is pumped out. It is desirable for the physical staff to know the location and orientation of the tip of the surgical needle within the body of the patient, in order to minimize physical injury to the tissues surrounding the desired organ.
- Methods for determining the location and orientation of the tip of a surgical device, such as a catheter, or a biopsy needle are known in the art. One such method utilizes a sensor wound around the tip of the biopsy needle. The sensor produces an electrical output in response to an electromagnetic filed, according to the location and orientation of the sensor in space. A display displays a representation of the location and orientation of the tip of the biopsy needle, superimposed on an image of the body of the patient, according to the output of the sensor.
- Another method utilizes a sensor located within the tip of the catheter, and the sensor detects the location and orientation of the tip of the catheter in a similar manner. Yet another method, utilizes an electron spin resonance (ESR) sample placed within a probe which is inserted into the body of a patient, who is imaged by a magnetic resonance imaging (MRI) apparatus. The location and orientation of the ESR sample is determined according to the frequency of the ESR, in presence of a magnetic field of the MRI.
-
International Application Publication Number WO 97/29682 - The ultrasonic imager is placed on the body above the target tissue. An image plane of the ultrasonic imager bisects the target tissue. The position of the first position sensor relative to the image plane, can be dynamically determined The actual trajectory over which biopsy needle advances can be determined by storing the positions of the needle during its movement.
-
US Patent No. 6,073,043 issued to Schneider and entitled "Measuring Position and Orientation Using Magnetic Fields", is directed to a system for determining the position and orientation of a catheter. The system includes a plurality of field generation means, a sensor, an amplifier, an analog to digital converter (ADC), a processor, a digital to analog converter (DAC), a multiplexer, and a plurality of driving amplifiers. - Each field generating means includes a pair of B-field generator coils (i.e., magnetic field coils). The sensor is in the form of a coil. The signal processor is in the form of a low pass filter to reduce out of band signals to reach the processor. The sensor is connected to the amplifier. The signal processor is connected to the amplifier and to the ADC. The processor is connected to the ADC and to the DAC.
- The multiplexer is connected to the DAC and to the driving amplifiers. The driving amplifiers are connected to the field generating means.
- The driving amplifiers supply power to each of the B-field generator coils. The sensor receives electromagnetic fields which the field generating means generates. The amplifier amplifies an output of the sensor. The signal processor processes the amplified output of the amplifier. The ADC converts the amplified output from analog to digital format. The processor determines the position and orientation of the sensor, by performing a signal withdrawal method.
-
US Patent No. 5,882,304 issued to Ehnholm et al., and entitled "Method and Apparatus for Determining Probe Location", is directed to a system for determining the position of a probe within an anatomy of a patient. The system includes a probe, the lock unit, a position acquisition controller, a gradient controller, and a display. The probe includes an active electron spin resonance (ESR) sample, which exhibits resonance when located in a magnetic field produced by a magnet of a magnetic resonance imaging (MRI) apparatus. The MRI apparatus includes the magnet and a main magnetic field and gradient coils. The lock unit is connected to the probe and to the position acquisition controller. The position acquisition controller is connected to the gradient controller. The display is connected to the position acquisition controller. - The patient is placed in an imaging region of the MRI apparatus. The probe is inserted into a biopsy needle and the biopsy needle is inserted into the anatomy of the patient. The lock unit measures the ESR frequency of the ESR sample, and the local field which acts on the probe. The position acquisition controller acts on the gradient coils through the gradient controller, according to the result of this measurement.
- The MRI apparatus produces three gradient magnetic fields. The position of the ESR sample is determined according to the three gradient magnetic fields. In the presence of one of the gradient magnetic fields, the ESR frequency is a function of the position of the ESR sample along that gradient magnetic field. The system determines the coordinates of the probe, by measuring the ESR frequency in three directions. The display displays the position of the probe superimposed on an image of the patient. When the biopsy needle reaches the desired position in the anatomy of the patient, the probe is removed from the biopsy needle, and a biopsy mandrel is inserted in the biopsy needle, in order to withdraw a biopsy sample from the anatomy of the patient.
- It is an object of the disclosed technique to provide a novel method and system for navigating a surgical needle toward a target organ of the body of a patient.
- In accordance with the disclosed technique, there is thus provided a system for navigating a surgical needle toward a target organ of the body of a patient. The system includes a removable mandrel, a medical positioning system (MPS) sensor, an electromagnetic field generator, and an MPS. The removable mandrel is located within the surgical needle. The removable mandrel can be moved in and moved out of the surgical needle. The MPS sensor is located at the tip of the removable mandrel.
- The electromagnetic field generator generates an electromagnetic field. The MPS is coupled with the MPS sensor and with the electromagnetic field generator. The MPS sensor produces an output according to the electromagnetic field. The MPS determines the position of the tip of the removable mandrel in a coordinate system respective of the MPS, according to the output of the MPS sensor. The MPS produces an indication respective of the position of the tip of the removable mandrel, to enable navigation of the surgical needle toward the target organ.
- In accordance with another aspect of the disclosed technique, there is thus provided a surgical needle system. The system includes a surgical needle, a removable mandrel, and a medical positioning system (MPS) sensor. The removable mandrel is located within the surgical needle. The MPS sensor is located at the tip of the removable mandrel. The MPS senor is coupled with an MPS.
- The MPS is coupled with an electromagnetic field generator. The electromagnetic field generator generates an electromagnetic field. The MPS sensor produces an output according to the electromagnetic field. The MPS determines the position of the tip of the removable mandrel in a coordinate system respective of the MPS, according to the output of the MPS sensor. The MPS produces an indication respective of the position of the tip of the removable mandrel, to enable navigation of the surgical needle toward the target organ.
- In accordance with a further aspect of the disclosed technique, there is thus provided a method for navigating a surgical needle toward a target organ of the body of a patient. The surgical needle includes a removable mandrel there within. The method includes the procedures of coupling a medical positioning system (MPS) sensor with an MPS, generating an electromagnetic field, and producing an output by the MPS sensor. The method further includes the procedures of determining coordinates respective of the position of the tip of the removable mandrel, and producing an indication respective of the position of the tip of the removable mandrel.
- The MPS sensor is located at the tip of the removable mandrel. The electromagnetic field is generated by an electromagnetic field generator. The output of the MPS sensor is produced according to the electromagnetic field. The coordinates respective of the position of the tip of the removable mandrel, are determined in a coordinate system respective of the MPS, according to the output of the MPS sensor. The indication respective of the position of the tip of the removable mandrel, is produced according to the determined coordinates, to enable navigation of the surgical needle toward the target organ.
- The disclosed technique will be understood and appreciated more fully from the following detailed description taken in conjunction with the drawings in which:
-
Figure 1 is a schematic illustration of a system for navigating a surgical needle toward a target organ of the body of a patient, constructed and operative according to an embodiment of the disclosed technique; -
Figure 2 is a schematic illustration of a system for navigating a surgical needle toward a target organ of the body of a patient, constructed and operative according to another embodiment of the disclosed technique; -
Figure 3 is a schematic illustration of a device for either withdrawing a sample of a bodily fluid from a target organ of the body of a patient, or injecting a therapeutic substance into the target organ, constructed and operative according to a further embodiment of the disclosed technique; -
Figure 4 is a schematic illustration of a device, either for withdrawing a sample of a bodily fluid from a target organ of the body of a patient, or injecting a therapeutic substance into the target organ, constructed and operative according to another embodiment of the disclosed technique; -
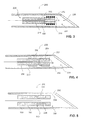
Figure 5 is a schematic illustration of a device either for withdrawing a sample of a bodily fluid from a target organ of the body of a patient, or injecting a therapeutic substance into the target organ, constructed and operative according to a further embodiment of the disclosed technique; and -
Figure 6 is a schematic illustration of a method for operating the system ofFigure 1 , operative according to another embodiment of the disclosed technique. - The disclosed technique overcomes the disadvantages of the prior art by providing a medical positioning system (MPS) sensor located at the tip of a removable mandrel of a surgical needle, and an MPS coupled with the MPS sensor and with an electromagnetic field generator. The surgical needle is employed either to withdraw a sample of a bodily fluid of a target organ of the body of a patient, or to inject a therapeutic substance (e.g., anticarcinogen, anticoagulant) into the target organ. The removable mandrel can be moved in and out of the surgical needle, and it blocks the entrance of undesired bodily substances of the body of a patient, into the surgical needle, while the surgical needle is being advanced into the body of the patient, toward the target organ.
- The MPS sensor produces an output according to the electromagnetic field which the electromagnetic field generator generates. The MPS determines the coordinates of the tip of the removable mandrel, in a coordinate system respective of the MPS, according to the output of the MPS sensor. The MPS superimposes a representation of the tip of the removable mandrel, on an image of the target organ, according to the coordinates of the tip of the removable mandrel, to enable withdrawal of the sample of the bodily fluid from the organ, after the removable mandrel is moved out of the surgical needle. The term "position" herein below, refers either to the location, to the orientation or both the location and the orientation, of an object in a three-dimensional coordinate system.
- Reference is now made to
Figure 1 , which is a schematic illustration of a system, generally referenced 100, for navigating a surgical needle toward a target organ of the body of a patient, constructed and operative according to an embodiment of the disclosed technique.System 100 includes a medical positioning system (MPS) 102, amagnetic field generator 104, asurgical needle 106, aremovable mandrel 108, anMPS sensor unit 110, adisplay 112, and animage source 114.MPS 102 includes aprocessor 116, and an analog to digital converter (ADC) 118.MPS sensor unit 110 includes an MPS housing (not shown) and an MPS sensor (not shown). The MPS housing can be in form of an adhesive applied overMPS sensor unit 110, plastic tube, elastomeric tube overMPS sensor unit 110 by applying heat, and the like. The MPS sensor is located within the MPS housing. The MPS housing is in the form of a cylinder.Processor 116 is coupled withelectromagnetic field generator 104,display 112,image source 114, and withADC 118. - The MPS sensor is in the form of an electromagnetic coil (i.e., a wound wire), which produces an electrical output in response to an electromagnetic field. The MPS housing is made of a metal, such as stainless steel, and the like.
Removable mandrel 108 is made of a metal, such as stainless steel, plastic, ceramic, and the like.Removable mandrel 108 is in the form of a tube having abore 120.MPS sensor unit 110 is firmly coupled with the tip ofremovable mandrel 108 by methods known in the art, such as welding, brazing, employing an adhesive, pressure fit (e.g.,MPS sensor unit 110 having a conical shape), and the like. The MPS sensor is coupled withADC 118 bywires bore 120. -
Image source 114 is in the form of an imager such as computer tomography (CT), magnetic resonance imager (MRI), positron emission tomography (PET), single photon emission computer tomography (SPECT), ultrasound image detector, infrared image detector, X-ray imager (e.g., C-arm), optical coherence tomography (OCT), and the like.Image source 114 provides a real-time video image (not shown) of an organ (not shown) of the body (not shown) of a patient (not shown), which is acquired during medical operation on the patient. Alternatively,image source 114 is in the form of a database, which includes an image of the organ, which is acquired prior to the medical operation on the patient. Further alternatively,image source 114 includes a still image of the organ. -
Image source 114 can produce a two-dimensional image of the target organ. Alternatively,image source 114 can produce a three-dimensional image of the target organ. Further alternatively,image source 114 can produce a right view and a left view of the target organ, thereby enabling a user to perceive a stereoscopic sensation of the image, by viewing the image on display 112 (e.g., by employing a stereoscopic pair of glasses). - An outer diameter of
removable mandrel 108 is less than an inner diameter of alumen 126 ofsurgical needle 106, to enable movement ofremovable mandrel 108 withinlumen 126, in directions designated byarrows removable mandrel 108 and ofMPS sensor unit 110 is of such value thatMPS sensor unit 110 andremovable mandrel 108 can be moved in unison, indirections MPS sensor unit 110 physically separates adistal portion 132 oflumen 126 from aproximal portion 134 oflumen 126. In this manner,MPS sensor unit 110 seals against aninner wall 136 oflumen 126, and thereby, fluids and solid materials which are located atdistal portion 132, can not reachproximal portion 134. Alternatively, a seal (e.g., an O-ring made of an elastomer - not shown) is coupled with a distal end ofMPS sensor unit 110, in order to seal the space betweenMPS sensor unit 110 andinner wall 136 oflumen 126. - The user can employ
surgical needle 106 to withdraw a sample of a bodily fluid (e.g., amniotic fluid) from a target organ of the patient (e.g., the uterus cavity of the patient). Alternatively, the user can employsurgical needle 106 to inject a therapeutic substance (e.g., anticarcinogen, anticoagulant), into the target organ. In casesurgical needle 106 is employed for collecting a fluid sample,removable mandrel 108 is employed for preventing contamination of the fluid sample. In casesurgical needle 106 is employed for injecting a therapeutic substance into the target organ,removable mandrel 108 is employed for flushing out chemical compounds fromsurgical needle 106. - When the user pierces the skin of the patient with
surgical needle 106, in order to reach a selected region of the target organ, which includes the desired bodily fluid,surgical needle 106 passes through various tissues and fluids, which are located in the vicinity of the target organ. In order to perform a reliable assay of the bodily fluid of the target organ, the sample of the bodily fluid should be substantially pure and substantially free of undesired bodily substances (e.g., tissues and fluids) which are located in the vicinity of the target organ. - Before piercing the skin of the patient, the user moves
removable mandrel 108 indirection 128 intolumen 126 ofsurgical needle 106, such thatMPS sensor unit 110 is located atdistal portion 132. In this manner,MPS sensor unit 110 prevents the undesired substances to reachproximal portion 134 fromdistal portion 132, and blocks entrance of the undesired substances toproximal portion 134. - The MPS sensor produces an analog electrical output in response to the electromagnetic filed which electromagnetic filed
generator 104 generates.ADC 118 converts the analog electrical output to a digital format, and provides this digital output toprocessor 116.Processor 116 determines the position of the MPS sensor, and thus the tip ofremovable mandrel 108 in a three-dimensional coordinate system, according to this digital output.Processor 116 produces an indication of the position of the tip ofsurgical needle 106 according to the position of the MPS sensor, for the user to navigatesurgical needle 106 toward the target organ. This indication can be for example, visual, aural, tactile, and the like. - In case of a visual indication,
display 112 displays the visual indication. In case the indication is aural, or tactile, the system includes a user interface (not shown), coupled with the processor, to present this indication to the user. -
Processor 116 can superimpose a representation (not shown) of the position of the tip ofremovable mandrel 108, on an image of the target organ whichimage source 114 provides.Processor 116, then directsdisplay 112 to display a superposition of the representation of the position of the tip ofremovable mandrel 108 on the image of the target organ. In this manner, the user can view a trajectory of the tip ofremovable mandrel 108, anddistal portion 132, as the user advancessurgical needle 106 in the body of the patient, toward the target organ. With the aid of this view, the user can maneuversurgical needle 106 within the body of the patient, in such a manner that the surrounding tissue is minimally severed, and furthermore, thedistal portion 132 reaches directly the selected region of the target organ. - The user can employ
surgical needle 106 to withdraw a sample of a bodily fluid from the target organ. In this case, whensystem 100 informs the user thatdistal portion 132 is located at the selected region of the target organ, the user can pull outremovable mandrel 108 fromlumen 126 ofsurgical needle 106, and collect the sample of the bodily fluid in a container (e.g., a vial), by employing a sucking mechanism (e.g., a mechanical pump, an electric pump). It is noted thatMPS sensor unit 110 which is located at the tip ofremovable mandrel 108, blocks entrance of undesired bodily substances toproximal portion 134, thereby preventing contamination of the sample of the bodily fluid of the target organ. - Alternatively, the user can employ the surgical needle to inject a therapeutic substance into the target organ. In this case, when the system informs the user that distal portion of the surgical needle is located at the selected region of the target organ, the user can pull out a removable mandrel which is made of a solid rod, from the lumen of the surgical needle, and then inject the therapeutic substance into the target organ.
- It is further noted that
surgical needle 106 can be a disposable surgical needle in order to prevent transfer of contagious diseases among different patients. However,removable mandrel 108 together withsensor unit 110 can be used for performing medical operations on different patients. In this case, the probability of transfer of a virus or a bacterium among patients is reduced, for example, by placing a disposable barrier over the removable mandrel (e.g., a polymer sheet such as Latex), by sterilizing the removable mandrel prior to the medical operation, and the like. - Reference is now made to
Figure 2 , which is a schematic illustration of a system, generally referenced 160, for navigating a surgical needle toward a target organ of the body of a patient, constructed and operative according to another embodiment of the disclosed technique.System 160 includes anMPS 162, areceiver 164, anelectromagnetic field generator 166, atransmitter 168, aremovable mandrel 170, anMPS sensor unit 172, asurgical needle 174, adisplay 176 and animage source 178.MPS 162 includes aprocessor 180 and anADC 182.MPS 162,electromagnetic field generator 166,surgical needle 174,display 176 andimage source 178, are similar toMPS 102,electromagnetic field generator 104,surgical needle 106,display 112, andimage source 114, respectively, as described herein above in connection withFigure 1 . -
MPS sensor unit 172 includes an MPS sensor (not shown) and an MPS housing (not shown), similar to the MPS sensor and the MPS housing ofsensor unit 110, as described herein above in connection withFigure 1 .Removable mandrel 170 is in the form of a solid rod. Alternatively, the removable mandrel is in the form of a tube, similar toremovable mandrel 108, as described herein above in connection withFigure 1 . -
Processor 180 is coupled withelectromagnetic field generator 166,display 176,image source 178, and withADC 182.Receiver 164 is coupled withADC 182.MPS sensor unit 172 is coupled with the tip ofremovable mandrel 170 in a similar manner of coupling ofMPS sensor unit 110 withremovable mandrel 108, as described herein above in connection withFigure 1 .Transmitter 168 is coupled withreceiver 164 by a wireless link, such as Bluetooth, WiFi, Zigbee, IEEE 802 series connections, and the like. -
Transmitter 168 is physically coupled withremovable mandrel 170 and withMPS sensor unit 172, and electrically coupled with the MPS sensor.Transmitter 168 is located at the tip ofremovable mandrel 170. In this case,removable mandrel 170 is in the form of a solid rod. Alternatively,transmitter 168 is located at a proximal end of the removable mandrel, in which case the transmitter is coupled with the MPS sensor by a pair of wires which pass through a bore of the removable mandrel. Further alternatively,transmitter 168 can be integrated withMPS sensor unit 172.System 160 operates similar tosystem 100, except that the MPS sensor is coupled withMPS 162 by a wireless link. - Reference is now made to
Figure 3 , which is a schematic illustration of a device, generally referenced 210, for either withdrawing a sample of a bodily fluid from a target organ of the body of a patient, or injecting a therapeutic substance into the target organ, constructed and operative according to a further embodiment of the disclosed technique.Device 210 includes asurgical needle 212, aremovable mandrel 214 and anMPS sensor 216.Removable mandrel 214 is in the form of a tubing, having abore 218.MPS sensor 216 is in the form of a wire, which is wound around anouter surface 220 ofremovable mandrel 214, at the tip ofremovable mandrel 214.MPS sensor 216 is coupled with an MPS (not shown) similar to MPS 102 (Figure 1 ), with a pair of wires (not shown) passing throughbore 218, as described herein above. - Alternatively,
device 210 can include a transmitter (not shown), similar to transmitter 168 (Figure 2 ) as described herein above. This transmitter is coupled with the MPS sensor, with the removable mandrel, and with a receiver (not shown), similar to the coupling as described herein above in connection withFigure 2 . - Each of an outer diameter of
removable mandrel 214, and a wire diameter ofMPS sensor 216 is of such value thatMPS sensor 216 andouter surface 220 ofremovable mandrel 214 seal against aninside wall 222 of alumen 224 ofsurgical needle 212. In this manner, the tip ofremovable mandrel 214 blocks entrance of undesired bodily substances from adistal portion 226 oflumen 224 to aproximal portion 228 oflumen 224. Hence,device 210 enables withdrawal of a substantially uncontaminated sample of a bodily fluid from a target organ (not shown) of the body (not shown) of a patient (not shown). - In the example set forth in
Figure 3 ,removable mandrel 214 is in the form of a tubing. Applicant has found out that if the diameter ofbore 218 is small enough, thenremovable mandrel 214 can block the entrance of undesired bodily substances fromdistal portion 226 oflumen 224 toproximal portion 228 oflumen 224. It is noted that this blocking action depends on the relation between the diameter ofbore 218 and the viscosity of the undesired bodily substances (i.e., if the diameter ofbore 218 is sufficiently small, or the viscosity of the undesired bodily substance is sufficiently large, then the undesired bodily substance can not flow within bore 218). However, the removable mandrel can be made of a solid rod, in whichcase MPS sensor 216 sends an output thereof to the MPS, via the transmitter. - Reference is now made to
Figure 4 , which is a schematic illustration of a device generally referenced 250, either for withdrawing a sample of a bodily fluid from a target organ of the body of a patient, or injecting a therapeutic substance into the target organ, constructed and operative according to another embodiment of the disclosed technique.Device 250 includes asurgical needle 252, anMPS sensor unit 254, aradiopaque marker 256 and aremovable mandrel 258.MPS sensor unit 254 includes an MPS sensor (not shown) and an MPS housing (not shown). The MPS sensor unit is located within the MPS housing.MPS sensor unit 254 andradiopaque marker 256 are located at adistal portion 266 ofremovable mandrel 258. - The MPS housing includes a housing bore there within (i.e., the MPS housing is in the form of a tube). An inner diameter of the housing bore is substantially equal to an outer diameter of
removable mandrel 258. An inside wall (not shown) of the housing bore is coupled with anouter surface 260 ofremovable mandrel 258, by fastening methods known in the art, such as welding, brazing, by employing an adhesive, and the like.Radiopaque marker 256 is in the form of a metallic foil, which is visible in an X-ray image thereof (i.e.,radiopaque marker 256 fluoresces under X-ray). Each of a housing outside diameter of the MPS housing, an inside wall diameter of aninside wall 262 of alumen 264 ofsurgical needle 252, and a marker outer diameter ofradiopaque marker 256 is of such value thatMPS sensor unit 254 seals againstinside wall 262, while an assembly ofremovable mandrel 258,MPS sensor unit 254 andradiopaque marker 256 move withinlumen 264. - The MPS sensor is coupled with an MPS (not shown). A processor (not shown) superimposes a representation of a position of the tip of
removable mandrel 258 on a real-time image (e.g., an X-ray image - not shown) of a target organ (not shown) of the body (not shown) of a patient (not shown). The processor directs a display (not shown) to display this X-ray image, along with a real-time image ofradiopaque marker 256. - In the example set forth in
Figure 4 ,removable mandrel 258 is in the form of a tubing. Applicant has found out that if the diameter of a mandrel bore ofremovable mandrel 258 is small enough, thenremovable mandrel 258 can block the entrance of undesired bodily substances from a distal portion oflumen 264 to a proximal portion oflumen 264. However, the removable mandrel can be made of a solid rod, in which case the MPS sensor sends an output thereof to the MPS, via a transmitter (not shown), similar to transmitter 168 (Figure 2 ) as described herein above. - Reference is now made to
Figure 5 , which is a schematic illustration of a device generally referenced 290, either for withdrawing a sample of a bodily fluid from a target organ of the body of a patient, or injecting a therapeutic substance into the target organ, constructed and operative according to a further embodiment of the disclosed technique.Device 290 includes asurgical needle 292, anMPS sensor unit 294 and aremovable mandrel 296.MPS sensor unit 294 includes an MPS sensor (not shown) and an MPS housing (not shown). The MPS sensor is located within the MPS housing. - A mandrel
outer surface 298 ofremovable mandrel 296 includes an undercut 300.MPS sensor unit 294 is similar to MPS sensor unit 254 (Figure 4 ) as described herein above.MPS sensor unit 294 fits inside undercut 300. Each of a housing outer diameter of the MPS housing, and a mandrel outer diameter ofremovable mandrel 296 is of such value that mandrelouter surface 298 and a housingouter surface 302 of the MPS housing seal against aninside wall 304 of alumen 306 ofsurgical needle 292, whileremovable mandrel 296 moves withinlumen 306. - In the example set forth in
Figure 5 ,removable mandrel 296 is in the form of a tubing. Applicant has found out that if the diameter of a mandrel bore ofremovable mandrel 296 is small enough, thenremovable mandrel 296 can block the entrance of undesired bodily substances from a distal portion oflumen 306 to a proximal portion oflumen 306. However, the removable mandrel can be made of a solid rod, in which case the MPS sensor sends an output thereof to the MPS, via a transmitter (not shown), similar to transmitter 168 (Figure 2 ) as described herein above. - Reference is now made to
Figure 6 , which is a schematic illustration of a method for operating the system ofFigure 1 , operative according to another embodiment of the disclosed technique. Inprocedure 330, an MPS sensor located at the tip of a removable mandrel of a surgical needle, is coupled with an MPS, the removable mandrel being located within the surgical needle. With reference toFigure 1 , the MPS sensor ofMPS sensor unit 110 is coupled withMPS 102, bywires MPS sensor unit 110 is located at the tip ofremovable mandrel 108. - In
procedure 332, an electromagnetic field is generated by an electromagnetic field generator. With reference toFigure 1 ,electromagnetic field generator 104 generates an electromagnetic field. - In
procedure 334, an output is produced by the MPS sensor according to the electromagnetic field. With reference toFigure 1 , the MPS sensor ofMPS sensor unit 110 produces an analog electrical output, in response to the electromagnetic field generated byelectromagnetic field generator 104. - In
procedure 336, the coordinates respective of the position of the tip of the removable mandrel is determined, in a coordinate system respective of the MPS, according to the output of the MPS sensor. With reference toFigure 1 ,ADC 118 converts the analog electrical output produced by the MPS sensor inprocedure 334, to digital format.Processor 116 determines the position of the MPS sensor, and thus the position of the tip ofremovable mandrel 108, in an MPS coordinate system respective ofMPS 102, according to the electrical output of the MPS sensor, in digital format. - In
procedure 338, an indication of the position of the tip of the removable mandrel is produced, to enable navigation of the surgical needle toward the target organ. With reference toFigure 1 ,processor 116 superimposes a representation of the position of the tip ofremovable mandrel 108, in an MPS coordinate system ofMPS 102, on an image of the target organ, and directsdisplay 112 to display this superimposed image. By viewing the superimposed image ondisplay 112, the physical staff can verify the position of the tip ofremovable mandrel 108, and thus the tip ofsurgical needle 106 relative to the selected region within the target organ. Once the physical staff ensures that the tip ofsurgical needle 106 is located at the desired position within the target organ, she can withdraw a sample of the bodily fluid from the target organ, after removingremovable mandrel 108 fromsurgical needle 106. - It will be appreciated by persons skilled in the art that the disclosed technique is not limited to what has been particularly shown and described hereinabove. Rather the scope of the disclosed technique is defined only by the claims, which follow.
Claims (25)
- System for navigating a surgical needle toward a target organ of the body of a patient, the system comprising:a removable mandrel located within said surgical needle, said removable mandrel to be moved in and moved out of said surgical needle;a medical positioning system (MPS) sensor located at the tip of said removable mandrel;an electromagnetic field generator for generating an electromagnetic field; andan MPS coupled with said MPS sensor and with said electromagnetic field generator, said MPS sensor producing an output according to said electromagnetic field, said MPS determining the position of said tip of said removable mandrel in a coordinate system respective of said MPS, according to said output of said MPS sensor, said MPS producing an indication respective of said position, to enable navigation of said surgical needle toward said target organ.
- The system according to claim 1, wherein said MPS sensor is located within an MPS housing, said MPS housing being in the form of a cylinder,
wherein said MPS housing is firmly coupled with said tip of said removable mandrel, and
wherein said MPS housing blocks entrance of said undesired bodily substances of said body of said patient, into said surgical needle, while said surgical needle is being advanced toward said target organ. - The system according to claim 1, wherein said MPS sensor is located within an MPS housing, said MPS housing being in the form of a tube, and
wherein said MPS housing is firmly coupled with an outer periphery of said removable mandrel, at a distal end of said removable mandrel. - The system according to claim 3, wherein an inner diameter of said MPS housing is substantially equal to an outer diameter of said removable mandrel.
- The system according to claim 3, wherein a housing outer diameter of said MPS housing is substantially equal to a mandrel outer diameter of said removable mandrel,
wherein said removable mandrel includes an undercut at a distal portion thereof, and
wherein said MPS housing is located within said undercut. - The system according to claim 1, wherein said MPS sensor is located within an MPS housing, said MPS housing being in the form of an adhesive, covering said MPS sensor.
- The system according to claim 1, wherein said removable mandrel is in the form of a solid rod.
- The system according to claim 1, wherein said removable mandrel is in the form of a tube.
- The system according to claim 1, wherein said MPS sensor is in the form of an electrically conductive coil wound around an outer surface of said removable mandrel.
- The system according to claim 1, further comprising:a processor coupled with said MPS sensor;an image source coupled with said processor, said image source including an organ image of said target organ; anda display coupled with said processor,wherein said processor determines said position of said MPS sensor, according to said output,
wherein said processor produces a superposition of a representation of said position on said organ image, and
wherein said display displays said superposition. - The system according to claim 1, further comprising a radiopaque marker located at said tip of said removable mandrel, wherein said display displays a marker image of said radiopaque marker against an organ image of said target organ.
- The system according to claim 1, wherein said MPS sensor is coupled with said MPS, via an electric conductor.
- The system according to claim 1, wherein said indication is selected from the list consisting of:visual;aural; andtactile.
- The system according to claim 1, wherein said surgical needle is employed to withdraw a sample of a bodily fluid from said target organ.
- The system according to claim 1, wherein said surgical needle is employed to inject a therapeutic substance into said target organ.
- The system according to claim 1, wherein said surgical needle is disposable.
- The system according to claim 1, further comprising a disposable barrier placed over said removable mandrel, said disposable barrier reducing the probability of transfer of a virus or a bacterium from said patient to another patient.
- The system according to claim 1, wherein said removable mandrel blocks entrance of undesired bodily substances of said body of said patient, into said surgical needle, while said surgical needle is being advanced toward said target organ.
- Surgical needle system comprising:a surgical needle;a removable mandrel located within said surgical needle; anda medical positioning system (MPS) sensor located at the tip of said removable mandrel, said MPS senor to be coupled with an MPS, said MPS to be coupled with an electromagnetic field generator, said electromagnetic field generator generating an electromagnetic field, said MPS sensor producing an output according to said electromagnetic field, said MPS determining the position of said tip of said removable mandrel in a coordinate system respective of said MPS, according to said output of said MPS sensor, said MPS producing an indication respective of said position, to enable navigation of said surgical needle toward said target organ.
- The system according to claim 19, wherein said surgical needle is employed to withdraw a sample of a bodily fluid from said target organ.
- The system according to claim 19, wherein said surgical needle is employed to inject a therapeutic substance into said target organ.
- The system according to claim 19, wherein said surgical needle is disposable.
- Method for navigating a surgical needle toward a target organ of the body of a patient, the surgical needle including a removable mandrel there within, the method comprising the procedures of:coupling a medical positioning system (MPS) sensor located at the tip of said removable mandrel, with an MPS;generating an electromagnetic field by an electromagnetic field generator;producing an output by said MPS sensor, according to said electromagnetic field;determining coordinates respective of the position of said tip of said removable mandrel, in a coordinate system respective of said MPS, according to said output of said MPS sensor; andproducing an indication respective of said position, according to said determined coordinates, to enable navigation of said surgical needle toward said target organ.
- The method according to claim 23, further comprising a procedure of producing a superposition of a representation of said position, on an image of said target organ.
- The method according to claim 23, further comprising a procedure of displaying said superposition.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US86111806P | 2006-11-27 | 2006-11-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1925262A1 true EP1925262A1 (en) | 2008-05-28 |
| EP1925262B1 EP1925262B1 (en) | 2015-03-18 |
Family
ID=39204026
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07121648.5A Not-in-force EP1925262B1 (en) | 2006-11-27 | 2007-11-27 | System for navigating a surgical needle toward an organ of the body of a patient |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20080132911A1 (en) |
| EP (1) | EP1925262B1 (en) |
| JP (1) | JP5235389B2 (en) |
| CA (1) | CA2612433C (en) |
| IL (1) | IL187667A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013130622A1 (en) * | 2012-02-27 | 2013-09-06 | Rafic Saleh | Medical surgical navigation sensor mounting system |
| CN104473677A (en) * | 2014-12-23 | 2015-04-01 | 东南大学 | Puncture needle with magnetic grid scale |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7998062B2 (en) | 2004-03-29 | 2011-08-16 | Superdimension, Ltd. | Endoscope structures and techniques for navigating to a target in branched structure |
| EP1667749B1 (en) | 2003-09-15 | 2009-08-05 | Super Dimension Ltd. | System of accessories for use with bronchoscopes |
| EP2316328B1 (en) | 2003-09-15 | 2012-05-09 | Super Dimension Ltd. | Wrap-around holding device for use with bronchoscopes |
| US8764725B2 (en) | 2004-02-09 | 2014-07-01 | Covidien Lp | Directional anchoring mechanism, method and applications thereof |
| US9129359B2 (en) * | 2006-11-10 | 2015-09-08 | Covidien Lp | Adaptive navigation technique for navigating a catheter through a body channel or cavity |
| US20080167639A1 (en) * | 2007-01-08 | 2008-07-10 | Superdimension Ltd. | Methods for localized intra-body treatment of tissue |
| WO2009074872A2 (en) | 2007-07-09 | 2009-06-18 | Superdimension, Ltd. | Patent breathing modeling |
| US8905920B2 (en) | 2007-09-27 | 2014-12-09 | Covidien Lp | Bronchoscope adapter and method |
| WO2009109879A2 (en) * | 2008-03-03 | 2009-09-11 | Koninklijke Philips Electronics N.V. | Biopsy guidance by electromagnetic tracking and photonic needle |
| US9575140B2 (en) | 2008-04-03 | 2017-02-21 | Covidien Lp | Magnetic interference detection system and method |
| US8218846B2 (en) | 2008-05-15 | 2012-07-10 | Superdimension, Ltd. | Automatic pathway and waypoint generation and navigation method |
| EP2297673B1 (en) | 2008-06-03 | 2020-04-22 | Covidien LP | Feature-based registration method |
| US8218847B2 (en) | 2008-06-06 | 2012-07-10 | Superdimension, Ltd. | Hybrid registration method |
| US8932207B2 (en) | 2008-07-10 | 2015-01-13 | Covidien Lp | Integrated multi-functional endoscopic tool |
| US20110201923A1 (en) * | 2008-10-31 | 2011-08-18 | Koninklijke Philips Electronics N.V. | Method and system of electromagnetic tracking in a medical procedure |
| US8611984B2 (en) | 2009-04-08 | 2013-12-17 | Covidien Lp | Locatable catheter |
| US10039527B2 (en) * | 2009-05-20 | 2018-08-07 | Analogic Canada Corporation | Ultrasound systems incorporating spatial position sensors and associated methods |
| US8556815B2 (en) * | 2009-05-20 | 2013-10-15 | Laurent Pelissier | Freehand ultrasound imaging systems and methods for guiding fine elongate instruments |
| US8319687B2 (en) * | 2009-12-09 | 2012-11-27 | Trimble Navigation Limited | System for determining position in a work space |
| US9486162B2 (en) | 2010-01-08 | 2016-11-08 | Ultrasonix Medical Corporation | Spatial needle guidance system and associated methods |
| US8428328B2 (en) | 2010-02-01 | 2013-04-23 | Superdimension, Ltd | Region-growing algorithm |
| US9820695B2 (en) | 2010-03-29 | 2017-11-21 | St. Jude Medical International Holding S.àr.l. | Method for detecting contact with the wall of a region of interest |
| WO2011159834A1 (en) | 2010-06-15 | 2011-12-22 | Superdimension, Ltd. | Locatable expandable working channel and method |
| US8971993B2 (en) | 2010-11-19 | 2015-03-03 | Mediguide Ltd. | Systems and methods for navigating a surgical device |
| US9439653B2 (en) | 2011-12-07 | 2016-09-13 | Traumatek Solutions B.V. | Devices and methods for endovascular access and therapy |
| US10118020B2 (en) | 2011-12-07 | 2018-11-06 | Traumatek Solutions B.V. | Devices and methods for endovascular access and therapy |
| US9295449B2 (en) | 2012-01-23 | 2016-03-29 | Ultrasonix Medical Corporation | Landmarks for ultrasound imaging |
| US20150202020A1 (en) * | 2012-07-24 | 2015-07-23 | Montefiore Medical Center | Method for epicardial pacing or cardiac tissue ablation |
| US20140051985A1 (en) * | 2012-08-17 | 2014-02-20 | Tailin Fan | Percutaneous nephrolithotomy target finding system |
| US10952593B2 (en) | 2014-06-10 | 2021-03-23 | Covidien Lp | Bronchoscope adapter |
| US10426555B2 (en) | 2015-06-03 | 2019-10-01 | Covidien Lp | Medical instrument with sensor for use in a system and method for electromagnetic navigation |
| EP3313289B1 (en) | 2015-06-23 | 2021-03-17 | Traumatek Solutions B.V. | Vessel cannulation device |
| US10524695B2 (en) * | 2015-12-22 | 2020-01-07 | Biosense Webster (Israel) Ltd. | Registration between coordinate systems for visualizing a tool |
| US10244963B2 (en) * | 2015-12-22 | 2019-04-02 | Biosense Webster (Israel) Ltd. | Ascertaining a position and orientation for visualizing a tool |
| US10327667B2 (en) * | 2016-05-13 | 2019-06-25 | Becton, Dickinson And Company | Electro-magnetic needle catheter insertion system |
| US10478254B2 (en) | 2016-05-16 | 2019-11-19 | Covidien Lp | System and method to access lung tissue |
| US10583269B2 (en) | 2016-06-01 | 2020-03-10 | Becton, Dickinson And Company | Magnetized catheters, devices, uses and methods of using magnetized catheters |
| US11413429B2 (en) | 2016-06-01 | 2022-08-16 | Becton, Dickinson And Company | Medical devices, systems and methods utilizing permanent magnet and magnetizable feature |
| US20170347914A1 (en) | 2016-06-01 | 2017-12-07 | Becton, Dickinson And Company | Invasive Medical Devices Including Magnetic Region And Systems And Methods |
| US11826522B2 (en) | 2016-06-01 | 2023-11-28 | Becton, Dickinson And Company | Medical devices, systems and methods utilizing permanent magnet and magnetizable feature |
| US10032552B2 (en) | 2016-08-30 | 2018-07-24 | Becton, Dickinson And Company | Cover for tissue penetrating device with integrated magnets and magnetic shielding |
| US10751126B2 (en) | 2016-10-28 | 2020-08-25 | Covidien Lp | System and method for generating a map for electromagnetic navigation |
| US10638952B2 (en) | 2016-10-28 | 2020-05-05 | Covidien Lp | Methods, systems, and computer-readable media for calibrating an electromagnetic navigation system |
| US10418705B2 (en) | 2016-10-28 | 2019-09-17 | Covidien Lp | Electromagnetic navigation antenna assembly and electromagnetic navigation system including the same |
| US10517505B2 (en) | 2016-10-28 | 2019-12-31 | Covidien Lp | Systems, methods, and computer-readable media for optimizing an electromagnetic navigation system |
| US10615500B2 (en) | 2016-10-28 | 2020-04-07 | Covidien Lp | System and method for designing electromagnetic navigation antenna assemblies |
| US10722311B2 (en) | 2016-10-28 | 2020-07-28 | Covidien Lp | System and method for identifying a location and/or an orientation of an electromagnetic sensor based on a map |
| US10446931B2 (en) | 2016-10-28 | 2019-10-15 | Covidien Lp | Electromagnetic navigation antenna assembly and electromagnetic navigation system including the same |
| US10792106B2 (en) | 2016-10-28 | 2020-10-06 | Covidien Lp | System for calibrating an electromagnetic navigation system |
| US11219489B2 (en) | 2017-10-31 | 2022-01-11 | Covidien Lp | Devices and systems for providing sensors in parallel with medical tools |
| US20210378516A1 (en) * | 2018-10-08 | 2021-12-09 | University Of Florida Research Foundation, Incorporated | Method and system for positioning invasive medical tools relative to 3d imagery |
| WO2023244703A1 (en) * | 2022-06-17 | 2023-12-21 | Boston Scientific Scimed, Inc. | Medical device position sensing components |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4431006A (en) * | 1982-01-07 | 1984-02-14 | Technicare Corporation | Passive ultrasound needle probe locator |
| WO1997029682A1 (en) | 1996-02-15 | 1997-08-21 | Biosense Inc. | Locatable biopsy needle |
| US5882304A (en) | 1997-10-27 | 1999-03-16 | Picker Nordstar Corporation | Method and apparatus for determining probe location |
| US6073043A (en) | 1997-12-22 | 2000-06-06 | Cormedica Corporation | Measuring position and orientation using magnetic fields |
| EP1184684A2 (en) * | 2000-07-20 | 2002-03-06 | Biosense, Inc. | Medical system calibration with static metal compensation |
| EP1374791A1 (en) * | 2002-06-17 | 2004-01-02 | Biosense, Inc. | Position sensing system with integral location pad and position display |
| US20050277829A1 (en) * | 2004-05-21 | 2005-12-15 | Mark Tsonton | Mri biopsy apparatus incorporating a sleeve and multi-function obturator |
| GB2423369A (en) * | 2005-02-22 | 2006-08-23 | Depuy Int Ltd | A position sensing probe for computer assisted surgery |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5005585A (en) * | 1989-04-24 | 1991-04-09 | Marshfield Clinic | Biopsy needle construction |
| US5086780A (en) * | 1990-05-21 | 1992-02-11 | Abbott Laboratories | Blood collection device |
| JP3506770B2 (en) * | 1994-04-21 | 2004-03-15 | オリンパス株式会社 | Endoscope position detection device |
| JP3772151B2 (en) * | 1994-04-21 | 2006-05-10 | オリンパス株式会社 | Insertion position detection device |
| ES2144123T3 (en) * | 1994-08-19 | 2000-06-01 | Biosense Inc | MEDICAL DIAGNOSIS, TREATMENT AND IMAGE SYSTEMS. |
| US5697377A (en) * | 1995-11-22 | 1997-12-16 | Medtronic, Inc. | Catheter mapping system and method |
| US20030069522A1 (en) * | 1995-12-07 | 2003-04-10 | Jacobsen Stephen J. | Slotted medical device |
| US5711299A (en) * | 1996-01-26 | 1998-01-27 | Manwaring; Kim H. | Surgical guidance method and system for approaching a target within a body |
| SE9600334D0 (en) * | 1996-01-30 | 1996-01-30 | Radi Medical Systems | Combined flow, pressure and temperature sensor |
| WO1999059650A2 (en) * | 1998-05-18 | 1999-11-25 | Holloran Brian O | Surgical needle with hand-actuable lock mechanism |
| US8442618B2 (en) * | 1999-05-18 | 2013-05-14 | Mediguide Ltd. | Method and system for delivering a medical device to a selected position within a lumen |
| US7778688B2 (en) * | 1999-05-18 | 2010-08-17 | MediGuide, Ltd. | System and method for delivering a stent to a selected position within a lumen |
| US6785571B2 (en) * | 2001-03-30 | 2004-08-31 | Neil David Glossop | Device and method for registering a position sensor in an anatomical body |
| US6926674B2 (en) * | 2001-04-19 | 2005-08-09 | Radi Medical Systems Ab | Combined pressure-volume sensor and guide wire assembly |
| US7697972B2 (en) * | 2002-11-19 | 2010-04-13 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| US7241283B2 (en) * | 2003-04-25 | 2007-07-10 | Ad-Tech Medical Instrument Corp. | Method for intracranial catheter treatment of brain tissue |
| US8333734B2 (en) * | 2003-07-03 | 2012-12-18 | Walter A. Zohmann | Fenestrated peripheral nerve block needle and method for using the same |
| JP2005157509A (en) * | 2003-11-21 | 2005-06-16 | Hitachi Ltd | Communication terminal |
| US7462175B2 (en) * | 2004-04-21 | 2008-12-09 | Acclarent, Inc. | Devices, systems and methods for treating disorders of the ear, nose and throat |
| US20070208252A1 (en) * | 2004-04-21 | 2007-09-06 | Acclarent, Inc. | Systems and methods for performing image guided procedures within the ear, nose, throat and paranasal sinuses |
| EP1761174B1 (en) * | 2004-05-21 | 2009-10-07 | Ethicon Endo-Surgery, Inc. | Mri biopsy apparatus incorporating an imagable penetrating portion |
| US7632265B2 (en) * | 2004-05-28 | 2009-12-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Radio frequency ablation servo catheter and method |
| US7263894B2 (en) * | 2004-06-07 | 2007-09-04 | Radi Medical Systems Ab | Sensor and guide wire assembly |
| CA2607935C (en) * | 2005-05-05 | 2014-07-08 | Boston Scientific Limited | Preshaped localization catheter and system for graphically reconstructing pulmonary vein ostia |
| US20070085686A1 (en) * | 2005-05-24 | 2007-04-19 | Stryker Gi, Ltd | Tracking of disposable components |
| US7331236B2 (en) * | 2006-03-21 | 2008-02-19 | Radi Medical Systems Ab | Pressure sensor |
| US7819844B2 (en) * | 2007-10-17 | 2010-10-26 | Gardia Medical Ltd. | Guidewire stop |
-
2007
- 2007-11-26 IL IL187667A patent/IL187667A/en active IP Right Grant
- 2007-11-27 EP EP07121648.5A patent/EP1925262B1/en not_active Not-in-force
- 2007-11-27 CA CA2612433A patent/CA2612433C/en not_active Expired - Fee Related
- 2007-11-27 US US11/945,828 patent/US20080132911A1/en not_active Abandoned
- 2007-11-27 JP JP2007305713A patent/JP5235389B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4431006A (en) * | 1982-01-07 | 1984-02-14 | Technicare Corporation | Passive ultrasound needle probe locator |
| WO1997029682A1 (en) | 1996-02-15 | 1997-08-21 | Biosense Inc. | Locatable biopsy needle |
| US5882304A (en) | 1997-10-27 | 1999-03-16 | Picker Nordstar Corporation | Method and apparatus for determining probe location |
| US6073043A (en) | 1997-12-22 | 2000-06-06 | Cormedica Corporation | Measuring position and orientation using magnetic fields |
| EP1184684A2 (en) * | 2000-07-20 | 2002-03-06 | Biosense, Inc. | Medical system calibration with static metal compensation |
| EP1374791A1 (en) * | 2002-06-17 | 2004-01-02 | Biosense, Inc. | Position sensing system with integral location pad and position display |
| US20050277829A1 (en) * | 2004-05-21 | 2005-12-15 | Mark Tsonton | Mri biopsy apparatus incorporating a sleeve and multi-function obturator |
| GB2423369A (en) * | 2005-02-22 | 2006-08-23 | Depuy Int Ltd | A position sensing probe for computer assisted surgery |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013130622A1 (en) * | 2012-02-27 | 2013-09-06 | Rafic Saleh | Medical surgical navigation sensor mounting system |
| JP2015509781A (en) * | 2012-02-27 | 2015-04-02 | サーレハ,ラフィック | Medical surgical navigation sensor mounting system |
| CN104473677A (en) * | 2014-12-23 | 2015-04-01 | 东南大学 | Puncture needle with magnetic grid scale |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5235389B2 (en) | 2013-07-10 |
| JP2008253729A (en) | 2008-10-23 |
| US20080132911A1 (en) | 2008-06-05 |
| IL187667A (en) | 2011-12-29 |
| EP1925262B1 (en) | 2015-03-18 |
| CA2612433A1 (en) | 2008-05-27 |
| CA2612433C (en) | 2016-05-10 |
| IL187667A0 (en) | 2008-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1925262B1 (en) | System for navigating a surgical needle toward an organ of the body of a patient | |
| US9888970B2 (en) | Systems and methods for navigating a surgical device | |
| US11529070B2 (en) | System and methods for guiding a medical instrument | |
| US11154283B2 (en) | Bodily sealants and methods and apparatus for image-guided delivery of same | |
| US6580938B1 (en) | Image-guided thoracic therapy and apparatus therefor | |
| EP3087922B1 (en) | System for registration of images captured by an imaging system in a coordinate system of a medical device navigation system | |
| EP1838378B1 (en) | Apparatus for guiding an instrument to a target in the lung | |
| JP4993982B2 (en) | Catheter apparatus and treatment apparatus | |
| EP0910300B1 (en) | Site marking probe | |
| US8784800B2 (en) | Method of delivering cell therapy to a target site | |
| US20040002643A1 (en) | Method of navigating medical devices in the presence of radiopaque material | |
| AU741022B2 (en) | Image-guided thoracic therapy and apparatus therefor | |
| JP2003180680A (en) | Navigation system | |
| CN116650081A (en) | Coaxial puncture needle and puncture system based on electromagnetic navigation | |
| US10695038B2 (en) | Devices, systems, and methods for obtaining a tissue sample | |
| JP4619501B2 (en) | Non-destructive needle and tissue collection device | |
| Fai et al. | Tool for transbronchial biopsies of peripheral lung nodules |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| 17P | Request for examination filed |
Effective date: 20081119 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| 17Q | First examination report despatched |
Effective date: 20090129 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A61B 17/34 20060101AFI20141028BHEP Ipc: A61B 19/00 20060101ALI20141028BHEP Ipc: A61B 10/02 20060101ALI20141028BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20141117 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 716025 Country of ref document: AT Kind code of ref document: T Effective date: 20150415 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602007040655 Country of ref document: DE Effective date: 20150430 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 716025 Country of ref document: AT Kind code of ref document: T Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150720 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150718 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602007040655 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| 26N | No opposition filed |
Effective date: 20151221 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151127 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151130 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151130 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151127 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20071127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20181015 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20181119 Year of fee payment: 12 Ref country code: GB Payment date: 20181025 Year of fee payment: 12 Ref country code: FR Payment date: 20181017 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 602007040655 Country of ref document: DE Representative=s name: KRAMER BARSKE SCHMIDTCHEN PATENTANWAELTE PARTG, DE Ref country code: DE Ref legal event code: R081 Ref document number: 602007040655 Country of ref document: DE Owner name: ST. JUDE MEDICAL INTERNATIONAL HOLDING S.A.R.L, LU Free format text: FORMER OWNER: MEDIGUIDE LTD., HAIFA, IL Ref country code: DE Ref legal event code: R081 Ref document number: 602007040655 Country of ref document: DE Owner name: ST. JUDE MEDICAL INTERNATIONAL HOLDING S.A R.L, LU Free format text: FORMER OWNER: MEDIGUIDE LTD., HAIFA, IL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 602007040655 Country of ref document: DE Representative=s name: KRAMER BARSKE SCHMIDTCHEN PATENTANWAELTE PARTG, DE Ref country code: DE Ref legal event code: R081 Ref document number: 602007040655 Country of ref document: DE Owner name: ST. JUDE MEDICAL INTERNATIONAL HOLDING S.A R.L, LU Free format text: FORMER OWNER: ST. JUDE MEDICAL INTERNATIONAL HOLDING S.A.R.L., LUXEMBOURG, LU |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E Free format text: REGISTERED BETWEEN 20190815 AND 20190821 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602007040655 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20191127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191127 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191127 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191130 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200603 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230602 |