CN1091693C - 控制打印头滑架移动的控制装置及其控制方法 - Google Patents
控制打印头滑架移动的控制装置及其控制方法 Download PDFInfo
- Publication number
- CN1091693C CN1091693C CN93121127A CN93121127A CN1091693C CN 1091693 C CN1091693 C CN 1091693C CN 93121127 A CN93121127 A CN 93121127A CN 93121127 A CN93121127 A CN 93121127A CN 1091693 C CN1091693 C CN 1091693C
- Authority
- CN
- China
- Prior art keywords
- value
- speed
- motor
- angle
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 18
- 238000001514 detection method Methods 0.000 claims abstract description 6
- 230000007246 mechanism Effects 0.000 claims description 25
- 230000005540 biological transmission Effects 0.000 claims description 14
- 238000013459 approach Methods 0.000 claims description 13
- 230000008450 motivation Effects 0.000 claims description 12
- 239000012528 membrane Substances 0.000 claims description 11
- 238000010586 diagram Methods 0.000 description 24
- 101000761698 Hydrophis hardwickii Short neurotoxin 1 Proteins 0.000 description 9
- 230000006870 function Effects 0.000 description 7
- 230000010354 integration Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000009432 framing Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J19/00—Character- or line-spacing mechanisms
- B41J19/18—Character-spacing or back-spacing mechanisms; Carriage return or release devices therefor
- B41J19/20—Positive-feed character-spacing mechanisms
- B41J19/202—Drive control means for carriage movement
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/19—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path
- G05B19/21—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path using an incremental digital measuring device
- G05B19/23—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path using an incremental digital measuring device for point-to-point control
- G05B19/231—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path using an incremental digital measuring device for point-to-point control the positional error is used to control continuously the servomotor according to its magnitude
- G05B19/232—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path using an incremental digital measuring device for point-to-point control the positional error is used to control continuously the servomotor according to its magnitude with speed feedback only
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41367—Estimator, state observer, space state controller
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/42—Servomotor, servo controller kind till VSS
- G05B2219/42104—Loop switch, speed loop then position loop, mode switch
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/42—Servomotor, servo controller kind till VSS
- G05B2219/42237—Pwm pulse width modulation, pulse to position modulation ppm
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45187—Printer
Abstract
一种控制有打印头安装在其上的滑架移动的控制装置,包括:速度检测装置,产生指示电机转速值和指示电机转向的信号;角度检测装置,产生指示电机的转角值;速度确定装置,根据目标角度值、目标速度值和转角值确定一设定速度值;速度控制装置,产生速度控制值;角度控制装置,产生角度控制值;选择装置,当转速值大于或小于第一速度值时选择速度控制值或角度控制值作为电机驱动控制值;驱动脉冲发生装置,产生电机驱动信号。
Description
本发明涉及一种控制打印头滑架移动的控制装置,并且尤其是涉及一种控制具有大惯性负载和可高速操作的串行打印机的打印头滑架移动的控制装置及方法。
在具有一个打印头滑架的打印机中,经一个包括一根导线或一个牙轮皮带的功率传输机构,将滑架连接至一个电机并将电机的转动转换成滑架的线性移动,从而移动一个在其上固定安装着一个打印头的常规的滑架。因为,在这些打印机之中,一个可高速操作的串行击打式打印机的打印头是沉重的并且鉴于减小打印机的尺寸的要求,因此趋向于要缩短滑架加速或减速移动的距离。所以,在加速或减速滑架时功率传输机构的振动传播至滑架,并且甚至在滑架速度达到一个目标值之后滑架的振动仍然持续,从而导致打印质量的下降。
为了限制这种振动并获得高的打印质量,人们通常采用一种具有一个随动控制系统的滑架移动控制装置,它是根据一种直接检测方法或一种间接检测方法构成的,该直接检测方法是用一个线性标度传感器直接检测滑架的移动速度(参看日本专利申请公开号平1-234280),该间接检测方法是通过在电机侧和驱动侧的滑轮上均安装速度传感器而间接检测功率传输机构的膨胀量或收缩量(参看日本专利申请公开号平1-238974)。
然而,上述的常规方案需要昂贵的线性标度传感器或在电机和随动机构两侧上的昂贵的速度传感器,此外,这个传感器或这些传感器必须高精度安装就位。
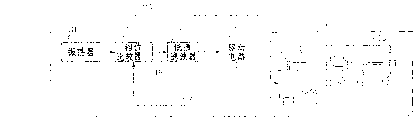
图1是表示限制振动并获得高的打印质量的另一个常规的方案的框图。在图1中,一个滑架驱动机构9包括一个滑架92,其上安装有一个打印头91,滑架92连接至一个功率传输机构98,功率传输机构98设置在一个驱动侧滑轮96与一个被驱动侧滑轮97之间,一个编码器95检测电机94的转速,电机94固定地安装在滑架驱动机构9的驱动侧滑轮96上。编码器95可以由一个旋转编码器构成,它产生两个相位彼此相差90°的信号。打印头91通过一个油墨色带(未示出)在一张夹在压纸卷筒93上的打印纸(未示出)上进行打印。
图1中所示的滑架移动控制装置的控制部分110通过一个锁相回路(在下文称之为PLL)驱动电机94,该锁相回路的作用是使一个高稳定性参考振荡器111的输出的相位与相应于电机94的转速的编码器95的输出脉冲信号y的相位同步。滑架移动控制装置的一个相位比较器112将编码器95的输出脉冲信号y的相位与参考振荡器111的输出的相位进行比较并产生一个相位差信号116。相位差信号116经过一个具有一个放大器功能的低通滤波器113调整相位并通过一个驱动电路114驱动电机94。电机94相应于相位差信号116的电压旋转并且编码器95产生一个相应于转速的频率信号。因此,电机94和编码器95起一个电压控制振荡器的作用。
在PLL控制的情况下,正常状态下滑架的移动速度的变化取决于采用的振荡器的稳定性。因此,如果采用高度稳定的振荡器,那么这种移动速度的变化就可以限制在相当小的数值。然而,为了将承受沉重负载的滑架从静止状态进行加速,PLL控制需要一个宽的俘获范围W。俘获范围W是PLL控制不锁定的频率与锁定时的频率之间的宽度,并且可以近似由公知的被称为G.S.Moschytz逼近的下述方程给出:
W=K·|F(jω)|其中K是PLL控制的回路增益,F(jω)是低通滤波器的传递函数,ω是电机的角速度,j是虚数单位。
当增大回路增益K以增大俘获范围W时,闭合回路将变得不稳定并振荡。为了解决这个问题,颁布给Nagai的美国专利US.4,457,639提出了一种滑架移动控制装置。图2表示Nagai的专利的滑架移动控制装置的框图。图2中表示的一个闭环电路包括一个参考振荡器111、一个相位比较器112、一个低通滤波器113和一个微分电路115。通过采用微分电路115改善低通滤波器113的高频段的增益,而拓宽俘获范围W。
然而,在图2中所示的闭环电路中,由于低通滤波器113和微分电路115分别是模拟电路,所以俘获范围W取决于这些电路中采用的电阻和/或电容的精度。此外,必须补偿大惯性负载的微分电路115容易受噪声的影响。另外,如果由于某种原因参考振荡器111停止工作,那么相位比较电路112将产生一个非常大的差信号116,从而由该相位差信号驱动的电机94将超速。此外,由于在这个例子中,未采用滑架92的位置信息(即电机的转角信息),因此当滑架92将要停止时不能确定滑架的精确停止位置,在最坏的情况下,滑架92可能会与装置的结构框架相碰撞。
本发明的一个目的是提供一种控制打印头滑架移动的控制装置及方法,它能够高速精确地移动滑架至目标位置。
本发明的另一个目的是提供一种不采用PLL控制、可以由数字电路构成并只需要在电机一侧上的一个传感器的控制打印头滑架移动的控制装置及方法。
根据本发明的控制打印头滑架移动的控制装置,一个电机驱动安装有一个打印头的滑架,该电机由电机驱动信号驱动,通过控制该电机驱动信号而控制滑架的移动。根据本发明的控制打印头滑架移动的控制装置包括:一个速度检测器、一个角度检测器、一个速度确定电路、一个速度控制电路、一个角度控制电路、一个选择电路和一个驱动脉冲发生器电路:该速度检测器检测电机的转速并产生一个指示转速的转速值及产生一个指示电机转动方向的信号;该角度检测器检测电机的转角并产生一个指示电机从一个初始位置转过的角度的转角值;该速度确定电路根据表示目标转角的目标角度值、表示目标转速的目标速度及转角值确定要设定的设定速度值;该速度控制电路根据由速度确定电路产生的设定速度值与转速值之间的差值产生一个速度控制值以使转速值更接近于设定速度值;该角度控制电路根据目标角度值与转角值之间的差值产生一个角度控制值以使转角值更接近于目标值;该选择器电路是这样工作的:当转速值大于第一速度值时该选择器电路选择速度控制值作为电机驱动控制值,当转速值小于第一速度值时该选择器电路选择角度控制值作为电机驱动控制值;该驱动脉冲发生器电路产生一个电机驱动脉冲,根据指示电机的转动方向的信号,对应于电机驱动控制值的幅度,该电机驱动脉冲被调制成正向电机驱动信号或反向电机驱动信号。
此外,根据本发明,控制打印头滑架移动的控制方法包括以下步骤:检测滑架移动机构的电机(电机经一个功率传输机构连接至打印头滑架)的转速值、转角值和转动方向,产生一个速度控制值以使得转速值更接近于设定速度值,由转角值产生一个角度控制值以使得转角值更接近于目标角度值,选择速度控制值或角度控制值作为电机驱动控制值,根据电机驱动控制值和转动方向产生一个正向或反向电机驱动信号。
根据上述方案,电机可以高速精确地跟随目标速度值和目标角度值。
图1是表示控制打印头滑架移动的一个常规的控制装置的框图;
图2是表示控制打印头滑架移动的另一个常规的控制装置的框图;
图3是表示根据本发明的一个实施例的控制打印头滑架移动的控制装置的框图;
图4是表示图3中所示的控制装置中的目标角度值与目标速度值的变化的曲线图;
图5是表示图3中所示的控制装置的角度检测器、速度检测器和控制速度确定电路的操作的定时关系图;
图6是详细表示速度检测器的框图;
图7是详细表示角度检测器的框图;
图8是详细表示控制速度确定电路的框图;
图9是表示由图3中所示的控制装置控制的电机的转速与转角的变化的曲线图;
图10是详细表示图3中所示的控制装置的速度控制电路的框图;
图11是图10中所示的速度控制电路的状态估计电路的电路框图;
图12是图10中所示的速度控制电路的另一个状态估计电路的电路框图;
图13是详细表示图3中所示的控制装置的角度控制电路的框图;
图14是详细表示图3中所示的控制装置的速度和角度比较器的框图;
图15和图16是分别表示图3中所示的控制装置的速度和角度比较器的操作的曲线图;
图17是详细表示图3中所示的控制装置的脉冲宽度调制器电路的框图;
图18是表示图17中所示的脉冲宽度调制器电路的操作波形图;
图19是图3中所示的控制装置的功率放大器的电路图;
图20是表示图3中所示的控制装置的操作的流程图。
图3是根据本发明的一个实施例的控制打印头滑架移动的控制装置的框图。
在图3中,根据表示滑架驱动机构9的滑架92的目标移动距离的数据SNO,目标值发生器100产生目标角度值SN13A和目标速度值SN13B。目标角度值SN13A和目标速度值SN13B分别表示滑架驱动机构9的电机94的目标转角和目标转速,并且是根据滑架92的目标移动距离在一个微处理机的控制下产生的。图4表示了目标速度值SN13B与目标角度值SN13A的变化。在图4中,显然目标速度值R0和R1是在电机的一个转动方向上而目标速度值R10和R11是在另一个转动方向上。目标值发生器100顺序输出组合的目标速度和目标角度值数据(R0,P0)、(R1,P1)、(R0,P2)、(R10,P4)、(R11,P5)和(R10,P6)。在下文将描述的相应的部分根据这些目标来控制滑架的移动。
滑架驱动机构9包括其上安装有打印头91的滑架92、一个设置在驱动滑轮96与被驱动滑轮97之间的功率传输机构(环形皮带)98(其上安装有滑92)、连接至驱动滑轮96的电机94、以及压纸卷筒93。每当电机94转过一定的角度,编码器95就产生一个脉冲,并输出一串这样产生的脉冲以及一串相位与所产生的脉冲串偏离90°的脉冲,即转动信号SN1和SN2。
速度检测器1根据转动信号SN1和SN2产生一个指示电机94的转速的转速值SN4和一个指示电机94的转动方向的信号SN5。角度检测器2根据转动信号SN1和SN2产生一个指示电机94的转角的转角值SN6。转角值对应于滑架92的位置。
控制速度确定电路3根据目标角度值SN13A、目标速度值SN13B和转角值SN6产生一个设定速度值SN12。具体而论,当启动电机94时最初产生的设定速度值SN12变成了由目标值产生器100产生的初始目标速度值,即,图4中的转速值R0,并且当转角值SN6变成初始目标角度值P0时,下一个目标速度值R1变成了设定速度值SN12。即,控制速度确定电路3监视转角值SN6,并且当它到达目标角度时,输出下一个目标速度值作为设定速度值SN12。速度控制电路4产生一个速度控制值SN7以使转速值SN4更接近于设定速度值SN12。角度控制电路5响应于转速值SN4和转角值SN6产生一个角度控制值以使转角值SN6更接近于目标角度值SN13。速度和角度比较器8根据转速值SN4是否在一个预定的控制速度范围内输出速度控制值SN7或角度控制值SN8作为电机控制值SN9。脉冲宽度调制电路6根据电机驱动控制值SN9和表示电机的转动方向的信号SN5产生一个正向电机驱动脉冲SN10或一个反向电机驱动脉冲SN11。功率放大器7根据正向和反向电机驱动脉冲SN10和SN11给电机94提供电机驱动功率。
本发明的这个实施例的特征在于:给控制速度确定电路3提供目标角度值SN13A和目标速度值SN13B,并且当电机的转角达到当前目标角度时控制速度确定电路3设定下一个目标速度,并且速度和角度比较器8检测速度控制值SN7和角度控制值SN8的幅度,并且当速度控制值SN7大于一个预定值εS时选择速度控制值SN7作为电机驱动控制值SN9,当速度控制值SN7小于预定值εS时选择角度控制值SN8作为电机驱动控制值SN9。因此,可以改善电机的停止位置的精度而不降低高速性能。
图5表示了编码器95的输出的波形以及速度检测器1、角度检测器2和控制速度确定电路3的操作的定时关系图。
在图5中,当电机94顺时针(CW)方向旋转时,来自编码器5的旋转信号SN1的相位超前信号SN2的相位90°,当电机逆时针(CCW)方向旋转时,旋转信号SN1的相位滞后90°。每当电机94转动滑轮961°时,就产生旋转信号SN1和SN2的每一个脉冲。在这个实施例中,编码器95包括一个盘板和两个光敏器件,该盘板牢固地安装于电机94的转动轴上,这两个光敏器件用于检测形成在盘板上的、每1°角度间隔一个孔的360个孔。每一个光敏器件的检测输出对应于旋转信号SN1和SN2。这些光敏器件设置成使其输出信号的相位彼此相差90°。
在图6中,速度检测器1有一个计数器11、一个锁存器12、一个前沿检测器13和转向检测器14,计数器11用于产生转速值SN4,前沿检测器13用于检测旋转信号SN1的前沿,转向检测器14用于根据旋转信号SN1与SN2之间的相位差产生一个指示电机94的转动方向的信号SN5。计数器11由一个时钟产生器10(图3)产生的高速时钟信号SN3计时以计算图5中所示旋转信号SN1的脉冲宽度T1、T2和T3(图5)等等。计数器11由前沿检测器13的一个输出预置在一个预置值C1,并递降计数高速时钟信号SN3,直至它接收到前沿检测器的下一个输出时为止。因此,电机94的转速越高,旋转信号SN1的脉冲的前沿之间的间隔越短,并因而计数器11的输出值越大。在计数器11由每一个旋转信号SN1预置之前,锁存器12立即锁存计数器11的计数值(W1、W2、W3)。锁存器12输出转速值SN4。
根据旋转信号SN1超前或滞后旋转信号SN2 90°,转向检测器14输出一个或低(L)或高(H)电平的信号SN5。
在图7中,角度检测器12有一个相位差检测器21和一个可逆计数器22,相位差检测器21用于检测旋转信号SN1与SN2之间的相位差,可逆计数器22用于根据相位差检测器21的输出210或220递升计数或递降计数,当旋转信号SN1的相位超前旋转信号SN2 90°时,可逆计数器22根据相位差检测器21的输出210递升计数旋转信号SN1的脉冲,当旋转信号SN1的相位滞后旋转信号SN2时,可逆计数器22递降计数旋转信号SN1的脉冲。因此,转角值SN6对应于由可逆计数器22的计数值表示的滑架92的位置。转速值SN4和转角值SN6之间具有定时关系以使得它们与旋转信号SN1同步产生。
图8是控制速度确定电路3的详细电路框图。在图8中,一个控制部分31顺序存储目标角度值SN13A和目标速度值SN13B。此外,控制部分31输出一个初始目标角度值SN13A作为一个初始设定的转角值SN14,并同时输出一个初始目标速度值SN13B作为一个初始设定的转速值SN16。于是,当控制部分31接收到一个角度苻合的信号SN15时,它就输出下一个目标角度值作为设定转角值SN14以及下一个目标速度值作为设定转速值SN16。一个角度设定寄存器32顺序存储设定的转角值SN14并输出它们作为设定的角度值SN17。当转角值SN6与设定的角度值SN17苻合一致时,角度比较器部分33输出角度苻合信号SN15。速度设定寄存器34顺序存储电机94的设定速度值SN16并输出它们作为设定速度信号SN12。
当根据图4中所示的目标值控制角度和速度时,控制部分31最初设定寄存器12中的目标角度值PO作为设定转角值SN14并同时设定速度设定寄存器34中的电机转速值RO作为设定转速值SN16。当电机94开始顺时针方向旋转并且电机94的转角达到角度PO、并且因而由角度检测器2的转角值SN6指示角度PO时,角度比较器部分33输出角度苻合信号SN15。控制部分31根据角度苻合信号SN15在角度设定寄存器32中设定下一个目标角度值P1作为设定转角值SN14,并同时在速度设定寄存器34中设定电机转速值R1作为设定转速值SN16。类似地,每当电机94转过角度P1和P2时,控制部分31就将电机转速修改成电机转速值R1和RO。图9表示出电机94的实际工作情况。
图10是速度控制电路4的详细电路框图。在图10中,速度控制电路4根据设定速度值SN12和转速值SN4输出速度控制电压值SN7。速度控制电路4用一个固件实现按照控制逻辑设计的功能。减法器41计算设定速度值SN12与转速值SN4之间的速度差e1.速度积分放大器42有这样一个功能,即从一个初始时刻开始将速度差e1平均然后将其与增益K1相乘。状态估计电路43由速度控制值SN7估计时刻t的滑架移动机构9的状态变量(即u(t))和转速值(即y(t))并输出信号S1、S2和S3。信号S1、S2和S3分别表示由电机的转速、滑架的移动速度和功率传输机构的变化(环形皮带的长度变化)的线性变换获得的值。状态反馈电路46计算速度控制值SN7,即u(t),它是这样计算的:将输出信号S1、S2和S3分别乘以增益Kf1、Kf2和Kf3,将乘积相加,再在和数上加上速度积分放大器42的输出。状态反馈电路46的一个控制器45的输出为负值,因此加法器44实际上起一个减法器的作用。
作为确定速度积分放大器42的增益Ki和状态反馈电路46的相应的增益Kf1、Kf2和Kf3的方法的一个例子,将对依据最佳调节器的方法进行描述。由于图3中所示的滑架移动机构9是一个机电组合系统,所以其特征方程由一个运动方程和一个电压方程描述,并由下述方程表示:
y(t)=C·x(t) ……(1)其中u(t):速度控制值
x(t):滑架移动机构内部的状态变量
y(t):转速值。
在由方程(1)表示的系统中,假设一个控制系统使转速值SN4(即y(t))跟随设定速度值SN12(即r)而变化。在控制系统的每一个恒定的时间间隔T检测转速值y(t)的过程中,将方程(1)转换成下述微分方程:
x(k+T)=Ad·x(k)+Bd·u(k)
y(k)=Cd·x(k) ……(2)
其中k=0,T,2T,3T,……
Ad=exp(AT);
Cd=C
方程(2)的一个离散系统模型由下述方程(3)进行变量转换,结果产生称为增广系统模型的下述方程(4):
ε(k)=r-y(k)
ξ(k)=x(k+T)-x(k)
η(k)=u(k+T)-u(k) ……(3)
对方程(4)进行下述置换, y(k)=ε(k);u(k)=η(k)
对方程(4)和(5)选择合适的正对称矩阵(对任意一个向量x均有其标量x′px>0,p=p′的矩阵)Q和R,并由下述方程(8)确定一个评价函数J,并获得使J最小的k。
u(k)=Kx(k) ……(6)
人们知道,方程(6)的解由下述方程(7)表示的Ricatti方程给出。
0=P-A′PA+A′PB(R+B′PB)-1B′PA-C′QC
K=-(R+B′PB)-1B′PA ……(7)
假设方程(1)是一个三阶微分方程,那么K就变成由方程(8)表示的4×1矩阵
K=[Kf1 Kf2 Kf3 Ki] ……(8)
从方程(8)获得速度积分放大器42和状态反馈电路46的增益Ki、Kf1、Kf2和Kf3。
通过改变由方程(6)给出的Q和R的值,就改变了方程(8)的K的相应的因子Ki、Kf1、Kf2和Kf3,并因此可以调节电机的驱动性能和滑架速度。
图11是表示状态估计电路43的一个例子的框图。在图11中,状态估计电路43由时刻n时的速度控制值u(n)、转速值y(n)以及电机的转速、滑架速度和功率传输机构的变化量的估计量Si(n)(i=1,2,3,…)计算时刻n+1时的电机的转速、滑架速度和功率传输机构的变化量的估计量Si(N+1)(i=1,2,3,……),并将它们存储在三个相应的延迟电路4319、4320和4321中。此外,状态估计电路43包括加法器4316、4317和4318以及延迟装置4319、4320和4321,加法器4316、4317和4318用于分别对乘法器4301-4305、4306-4310和4311-4315的输出求和,延迟装置4319、4320和4321用于分别暂时存储加法器4316、4317和4318的输出。乘法器4301、4306和4311输出延迟装置4319的输出与相应的系数a11、a21和a31的乘积。类似地,乘法器4302、4307和4312输出延迟装置4320的输出与相应的系数a12、a22和a32的乘积,而乘法器4303、4308和4313输出延迟装置4321的输出与相应的系数a13、a23和a33的乘积。此外,乘法器4304、4309和4314输出速度控制值u(n)与相应的系数h1、h2和h3的乘积,而乘法器4305、4310和4315输出转速值y(n)与相应的系数g1、g2和g3的乘积。
作为确定状态估计电路43的相应的乘法器4301-4305、4306-4310和4311-4315的系数aij、hi和gi(i,j=1,2,3,…)的方法的一个例子,将描述称为卡尔曼滤波器(Kalman filter)的一个观测器算法。
根据方程(2)所示的离散系统模型,下述方程表示了一个考虑了模型的内部噪声W(k)和检测到的噪声V(k)的模型:
x(k+1)=Ad·x(k)+Bd·u(k)+N·W(k)
y(k)=Cd·x(k)+V(k) ……(9)其中 E[W(k)]=E[V(k)]=0
E[W(k)·W′(k)]=Q
E[V(k)·V′(k)]=R
E[V(n)·V′(n)]=0 ……(10)E[ ]是由下述方程表示的平均时间:
假设估计状态变量x(k)的变量Z(k)由下述方程表示:
z(k+1)=F·z(k)+L·u(k)+G·g(k) ……(12)其中F=A-GC;L=B
状态量x(k)与估计量z(k)之间的估计条件由下述方程给出
E[|x(k)-Z(k)|z]→0(k→z) ……(13)
满足方程(12)和(13)的G作为Ricatti方程的解由下述方程给出。
0=P-APA′+APC′(R+CPC′)-1CPA′-NQN′
G=APC′(R+CPC′)-1 ……(14)F、L和G由如下的相应的因子表示,并且状态估计电路43的乘法器4301-4305、4306-4310和4311-4315的相应的系数aij、hi和gi(j,j=1,2,3,…)由方程(15)给出:
图12表示了状态估计电路43的另一个例子。在图12中,状态估计电路43有一个类似于图11所示的结构。然而,通过按在控制逻辑中称为卡尔曼滤波器的观测器算法获得的最佳值,图11中所示的相应的乘法器4301-4305的系数aij,hi和gi(i,j=1,2,3,…)可以估计乘法器4303、4308、4311和4312的系数a13、a23、a31和a32。即,图12中的状态估计电路43包括加法器4333、4334和4335及延迟装置4336、4337和4338,加法器4333、4334和4335用于对相应的乘法器4322-4325、4326-4329和4330-4332的输出求和,延迟装置4336、4337和4338用于暂时存储相应的加法器4333、4334和4335的输出。乘法器4322和4326分别输出延迟装置4336的输出与系数A11和A21的乘积。类似地,乘法器4323和4327分别输出延迟装置4337的输出与系数A12和A22的乘积,而乘法器4330输出延迟装置4338的输出与系数A33的乘积。乘法器4324、4328和4331输出速度控制值u(n)与相应的系数H1、H2和H3的乘积,而乘法器4325、4329和4332输出速度信息y(t)与相应的系数G1、G2和G3的乘积。与图11所示的状态估计电路43相比,图12所示的状态估计电路43中的乘法次数和加法次数更少。
如上所述,速度控制电路4的状态估计电路43分别将电机的转速、滑架的移动速度和功率传输机构的变化线性变换成速度控制值,并输出信号S1、S2和S3。将这些信号S1、S2和S3与由状态方程获得的相应的系数Kf1、Kf2和Kf3相乘获得的信号加到积分放大器42的输出上。另一方面,积分放大器42顺序地对速度差信号e1进行积分并将其保持一个恒定的时间。当差信号变成0时,积分器42的输出消失。此时,加法器44的输出的变化也停止,得到一个恒定的输出。此外,当转速值SN4趋近于0时,作为积分放大器42与控制器45的输出的和的速度控制值SN7也趋近于0。
图13是角度控制电路5的一个详细的电路框图。在图13中,减法器51计算目标角度值SN13与转角值SN6之间的角度差e2。加法器56对从一个初始时刻开始的角度差e2求平均而后将积分得到的值乘以一个预定的第一系数而获得的值、转角值SN6乘以一个预定的第二系数而获得的值、以及转速值SN4乘以一个预定的第三系数而获得的值相加,并将其和作为角度控制值SN8输出。角度差积分。52从初始时刻开始对角度差e2积分或求平均,并且乘法器53、54和55将其输入信号与预定的第一、第二和第三系数相乘。
乘法器54和55的第二和第三系数是负值,并在角度控制期间决定控制量的幅度。即,尽管第二和第三系数的绝对值很大,但收敛于目标角度值很快,当然,还不是很稳定的。相反地,当这些系数的绝对值很小时,尽管收敛时间变长但转角控制可能是稳定的。当转角值SN6等于目标角度值SN13时,乘法器53和54的输出的和变成0。当同时转速值SN4也变成0时,角度控制值SN8变成0。
图14是速度和角度比较器8的一个详细的电路框图。在图14中,速度比较器81输出速度控制值SN7作为控制驱动值SN80,直至转速值SN4落入一个第一预定速度范围εs内,并且当它落入第一速度范围εs内时输出角度控制值SN8作为控制驱动值SN80。当转速值SN4和转角值SN6分别落入比第一预定速度范围窄的第二预定速度范围εv内和一个预定角度范围εx内时,速度/角度比较器82停止提供作为电机驱动控制值SN9的控制驱动值SN80,否则,将输出控制值SN80作为电机驱动控制值SN9。
图15表示了转速值SN4与时间之间的关系,图16表示了转速值SN4与转角值SN6之间的关系。下面参照图13至图16详细描述角度控制电路5和速度/角度比较器8。由于速度控制电路4未采用转角值SN6,所以难以将电机94精确地停在目标停止角度上。当速度/角度比较器8检测到电机94的速度落入一个停止阈值εS范围内时,利用角度控制电路5的输出构成将电机94停在目标停止角度PY上的角度控制系统。速度/角度比较器8输出速度控制值SN7直至转速值SN4落入预定速度范围εS内,并且当它落入预定速度范围εS内时输出角度控制值SN8,如图15所示,并且最终当转速值SN4和转角值SN6分别落入一个比预定速度范围εS窄的一个预定速度范围εV内和一个预定角度范围εx内时,停止控制驱动值,如图16所示。伴随着这个操作,电机94的角度和速度分别逐渐落入阈值εX和εV的范围内,并且电机94的角度和速度分别收敛于目标停止角度和0 。此时,比较器82产生一个控制结束标志。
图17是脉冲宽度调制电路6的一个详细电路框图,图18是表示脉冲宽度调制电路的操作的波形图。在这些图中,寄存器61存储电机驱动控制值SN9。高速时钟计数器63计数高速时钟SN3。比较器62将寄存器61的输出与高速时钟计数器63的输出进行比较,并且当时钟计数器63的输出等于寄存器61的输出时,输出一个苻合信号SN63。另一方面,高速时钟分频器64将高速时钟SN3分频并输出时钟分频信号SN61。分频信号SN61的周期是电机94的驱动脉冲的周期。RS触发器65分别由时钟分频信号SN61和苻合信号SN63置位和复位,并输出一个电机驱动脉冲SN62。因此,电机驱动脉冲SN62的脉冲宽度相对于寄存器61的输出值而变化。选择器66根据来自速度检测部分1的指示转动方向的信号SN5可选择地输出电机驱动脉冲SN62作为正向电机驱动脉冲SN10或反向电机驱动脉冲SN11。在这个实施例中,电机的正向转动是顺时钟方向的转动而反向转动是逆时针方向的转动。由于当电机94启动时的初始时刻尚未产生方向指示信号SN15,所以选择器66根据目标值产生器部分100(图3)的输出(未示出)强制地决定起始时刻的转动方向。
图19是功率放大器7的详细电路框图。在图19中,功率放大器7包括四个桥接的晶体管71-74。桥的一端连接于电源76,而另一端连接于电机94。晶体管71和72响应于正向电机驱动脉冲SN10而导通以由电源76提供电流使电机94顺时针(CW)方向旋转。另一方向,当提供反向电机驱动脉冲SN11时,晶体管73和74导通以由电源74提供电流使电机94逆时针(CCW)方向旋转。
现在,将描述一个报警发生机构。在根据本发明的控制滑架移动的控制装置中,使用了许多延迟元件,即寄存器。因此,当由于加、减和/或乘的结果发生溢出时,不可能实现正常的控制。为了处理这个问题,当发生溢出时或确定电机驱动电压相对于电源电压变得异常时,强制停止伺服控制,以防止系统的电和/或机械损坏。此外,本发明的装置具有当由于装置中的电路损坏和/或导线损坏而不能进行正常速度和位置控制时产生报警的功能。尽管没有表示出实现这些功能的具体电路,但说明可以监测相应的电路中采用的加法器和/或乘法器的输出是否溢出并且如果发生溢出就停止伺服控制就足够了。
图20是表示如图3所示的控制具有打印头滑架移动的控制装置的操作的一个流程图。在开始调整时,用于控制的所有寄存器和计数器都清零并且然后设置以各种常数(S1)。然后,速度检测器1和角度检测器2检测电机94的转速和转角并计算它们的数值(S2)。如果在步骤S2中计算的电机94的速度超出预定速度范围εS(S3),则速度/角度比较器8由速度控制电路4执行速度控制(S4)。如果在速度控制期间没有溢出(S5),则速度/角度比较器8产生电机驱动控制值SN9以驱动电机94(S6),并由于没有控制结束标志而再次执行步骤S2。当在步骤S2中计算的电机94的速度落入预定速度范围εS内但仍超出预定速度范围εV时或当在步骤S2中计算的电机94的角度超出预定角度范围εX时(S8),由角度控制电路5执行角度控制(S9)。如果在这个角度控制期间没有溢出(S5),则速度/角度比较器8产生电机驱动控制值SN9以驱动电机94(S6),并由于没有控制结束标志而再次执行步骤S2。当在步骤S2中计算的电机94的速度落入预定速度范围εS内并且又落入预定速度范围εV内并且在步骤S2中计算的电机94的角度落入预定角度范围εX内时(S8),产生控制结束标志(S11)并且控制终止(S7)。如果在速度控制和角度控制期间有溢出(S5),则执行报警处理(S10),产生控制结束标志(S11),并且控制终止(S7)。
如上文所述,根据本发明,通过以下技术方案获得了一种控制打印头滑架移动的高速且无误差的控制装置:检测滑架移动机构的电机(电机经一个功率传输机构连接于打印头滑架)的转速值、转角值和转动方向,产生一个速度控制值以使得转速值更接近于设定速度值,由转角值产生一个角度控制值以使得转角值更接近于目标角度值,根据转速值和转角值是否分别落入一个预定速度范围和一个预定角度范围而输出速度控制值或角度控制值作为电机驱动控制值或者停止该输出,根据电机驱动控制值和转动方向产生一个正向或反向电机驱动信号并根据正向或反向电机驱动脉冲给电机提供一个电机驱动功率。
应当注意的是,本发明并不限于所述的实施例,并且可以以各种方式进行更改。例如,尽管脉冲宽度调制制电路6是根据来自速度/角度比较器8的电机驱动控制值SN9进行脉冲宽度调制而产生电机驱动脉冲的,但是也可以采用一个脉冲频率调制电路来代替脉冲宽度调制电路。
尽管通过参照附图用优选实施例已对本发明进行了完整的描述,但是熟知该领域的技术人员显然将会做出各种改变和替换。因此,除非这些改变和替换脱离本发明范围,否则它们应当被认为包含在本发明的范围内。
Claims (14)
1.一种控制具有一个打印头的滑架移动的控制装置,通过用电机驱动信号驱动该电机同时控制该电机驱动信号完成该滑架的移动,其特征在于,该控制装置包括:
一个速度检测器,用于检测该电机的转速并产生一个指示该电机的转速的转速值和一个指示该电机的转动方向的信号;
一个角度检测器,用于检测该电机的转角并产生一个指示该电机从一个初始位置转过的转角的转角值;
一个速度确定电路,用于根据表示目标转角的目标角度值、表示目标转速的目标速度值和该转角值确定要设定的一个设定速度值;
一个速度控制电路,用于根据该转速值与该设定速度值之间的差值产生一个速度控制值以使该转速值接近于该设定速度值;
一个角度控制电路,用于根据该目标角度值与该转角值之间的差值产生一个角度控制值以使该转角值接近于该目标角度值;
一个选择电路,用于当该转速值大于一个第一速度值时选择该速度控制值作为电机驱动控制值,并且当该转速值小于该第一速度值时选择该角度控制值作为电机驱动控制值;以及
一个驱动信号发生器,用于产生一个电机驱动信号,根据该电机驱动控制值的幅度调制该电机驱动信号,并且用于根据指示转动方向的该信号输出该电机驱动信号作为一个正向电机驱动信号或一个反向电机驱动信号。
2.根据权利要求1所述的控制装置,其特征在于:进一步包括根据所述滑架的移动距离信息产生所述目标角度值和所述目标速度值的装置。
3.根据权利要求1所述的控制装置,其特征在于:所述速度确定电路包括一个用于确定所述转角是否等于所述目标角度值的苻合确定电路、一个用于当该转角值等于该目标角度值时输出该目标速度值作为所述设定速度值并给该苻合确定电路提供另一个目标角度值的电路。
4.根据权利要求1所述的控制装置,其特征在于:所述速度控制电路包括一个减法器、一个求平均电路、一个状态估计电路和一个状态反馈电路,该减法器用于计算所述设定速度值与所述转速值之间的速度差,该求平均电路用于从一个初始时刻开始对该速度差求平均,该状态估计电路用于根据所述速度控制值和该转速值估计所述滑架的速度和来源于所述电机的所述功率传输机构的状态变量,该状态反馈电路用于输出将该转速值、该滑架速度和该状态变量与相应的增益相乘的信号并将该乘积信号加到该求平均电路的一个输出上而产生该速度控制值。
5.根据权利要求4所述的控制装置,其特征在于:所述状态估计电路根据一个先前的时刻的所述转速值、所述滑架速度及所述状态变量与相应的系数的乘积的和输出在某一时刻的该转速值、该滑架速度及该状态变量的所说估计值。
6.根据权利要求1所述的控制装置,其特征在于:所述角度控制电路包括一个减法器、一个加法器,该减法器用于计算所述目标角度值与所述转角值之间的角度差,该加法器用于将由从一个初始时刻开始对该角度差求平均并将已求平均的角度差乘以一个第一系数而获得的一个数值、该转角值乘以一个第二系数获得的一个数值、以及所述转速值乘以一个第三系数而获得的一个数值相加,并将其和作为所述角度控制值输出。
7.根据权利要求1所述的控制装置,其特征在于:所述选择电路包括一个第一选择电路、一个第二选择电路,该第一选择电路用于当所述转速值大于所述第一速度值时输出所述速度控制值作为控制驱动值,并且当该转速值小于该第一速度值时输出所述角度控制值作为控制驱动值,该第二选择电路用于当该转速值和所述转角值分别低于一个小于该第一速度值的第二速度值和小于一个预定角度值时停止作为所述电机驱动控制值的该控制驱动值的输出,否则,输出该控制驱动值作为该电机驱动控制值。
8.根据权利要求1所述的控制装置,其特征在于:所述驱动信号发生器包括一个寄存器、一个高速时钟计数器、一个驱动电压比较器、一个高速时钟分频器、一个RS触发器、一个选择器,该寄存器用于存储所述电机驱动控制值,该高速时钟计数器用于计数高速时钟,该驱动电压比较器用于将该寄存器的输出与该高速时钟计数器的输出进行比较并输出一个苻合信号,该高速时钟分频器用于对该高速时钟进行分频并输出一个分频高速时钟信号,该RS触发器使该分频高速时钟信号和该驱动电压苻合信号成为置位和复位信号,并输出所述电机驱动信号,该选择器用于根据指示转动方向的所述信号有选择地输出该电机驱动信号作为所述正向电机驱动信号和所述反向电机驱动信号。
9.根据权利要求1所述的控制装置,其特征在于:根据来自一个固定于所述电机的转动轴上的相应的编码器的转动信号,产生所述转速值、指示转动方向的所述信号和所述目标角度值。
10.一种控制具有一个打印头的滑架移动的控制装置,通过用电机驱动信号驱动该电机,同时控制该电机驱动信号而完成该滑架的移动,该控制装置包括:
速度检测装置,用于产生指示该电机的转速的一个转速值;
角度检测装置,用于产生指示该电机从一个初始位置转过的转角的一个转角值;
速度确定装置,用于根据表示目标转角的目标角度值、表示目标转速的目标速度值和该转角值确定要设定的一个设定速度值;
速度控制装置,用于根据该转角值与该设定速度值之间的差值产生一个速度控制值以使该转速值接近于该设定速度值;
角度控制装置,用于根据该目标角度值与转角值之间的差值产生一个角度控制值以使该转角值接近于该目标角度值;
选择装置,用于当该转速值大于一个第一速度值时选择该速度控制值作为电机驱动控制值,并且当该转角值小于第一速度值时选择该角度控制值作为电机驱动控制值;以及
驱动信号发生装置,用于产生一个电机驱动信号并输出该电机驱动信号,根据该电机驱动控制值的幅度调制该电机驱动信号。
11.根据权利要求10所述的控制装置,其特征在于:进一步包括根据所述滑架的移动距离信息产生所述目标角度值和所述目标速度值的装置。
12.一种控制具有一个打印头的滑架移动的控制方法,通过用电机驱动信号驱动该电机,同时控制该电机驱动信号来完成该滑架的移动,该控制方法包括以下步骤:
检测该电机的转速并产生一个指示该电机的转速的转速值和一个转速值之间的速度差,从一个初始时刻开始对速度差求平均,根据所述速度控制值和该转速值估计所述滑架的速度和来源于所述电机的所述功率传输机构的状态变量,输出将该转速值、该滑架速度和该状态变量的估计值与相应的增益相乘的估计信号,并将该乘积信号加到该求平均步骤获得的一个输出上而产生该速度控制值。
16.根据权利要求12所述的控制方法,其特征在于:所述产生所述角度控制值的步骤包括以下步骤:计算所述目标角度值与所述转角值之间的角度差,将由从一个初始时刻开始对该角度差求平均并将已求平均的角度差乘以一个第一系数而获得的一个数值、该转角值乘以一个第二系数而获得的一个数值、以及所述转速值乘以一个第三系数而获得的一个数值相加,并且将其和输出作为所述角度控制值。
17.根据权利要求12所述的控制方法,其特征在于:所述选择步骤包括以下步骤:当所述转速值大于所述第一速度值时输出所述速度控制值作为控制驱动值,并且当该转速值小于该第一速度值时输出所述角度控制值作为控制驱动值,当该转速值和所述转角值分别低于一个小于该第一速度值的第二速度值和小于一个预定角度值时停止作为所述电机驱动控制值的该控制驱动值的输出,否则,输出该控制驱动值作为该电机驱动控制值。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP333942/92 | 1992-12-15 | ||
| JP33394292 | 1992-12-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1106339A CN1106339A (zh) | 1995-08-09 |
| CN1091693C true CN1091693C (zh) | 2002-10-02 |
Family
ID=18271704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN93121127A Expired - Fee Related CN1091693C (zh) | 1992-12-15 | 1993-12-15 | 控制打印头滑架移动的控制装置及其控制方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5433541A (zh) |
| EP (1) | EP0602628B1 (zh) |
| KR (1) | KR970003659B1 (zh) |
| CN (1) | CN1091693C (zh) |
| DE (1) | DE69325348T2 (zh) |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004077656A1 (ja) * | 1992-11-10 | 2004-09-10 | Hayato Naito | ブラシレスモータの速度検出装置 |
| JP3381348B2 (ja) * | 1993-12-27 | 2003-02-24 | セイコーエプソン株式会社 | プリンタ |
| US5670852A (en) * | 1994-01-18 | 1997-09-23 | Micropump, Inc. | Pump motor and motor control |
| US5661673A (en) * | 1995-08-31 | 1997-08-26 | National Semiconductor Corporation | Power efficient booth multiplier using clock gating |
| US5803628A (en) * | 1996-07-01 | 1998-09-08 | Xerox Corporation | Printing apparatus including encoder pending |
| US6121747A (en) * | 1997-09-02 | 2000-09-19 | Servologic Ltd. | Electric motor controller |
| JP3645708B2 (ja) * | 1998-04-30 | 2005-05-11 | 武藤工業株式会社 | 記録装置 |
| JP3022838B2 (ja) * | 1998-05-26 | 2000-03-21 | 日本電気データ機器株式会社 | 間引き印字駆動方法 |
| JP2000197381A (ja) * | 1998-12-25 | 2000-07-14 | Seiko Epson Corp | Dcモ―タ制御装置及びdcモ―タ制御方法 |
| US6064171A (en) * | 1999-06-11 | 2000-05-16 | Lexmark, International, Inc. | Host based stepper motor phase controller and method therefor |
| US6373211B1 (en) | 1999-09-17 | 2002-04-16 | Delphi Technologies, Inc. | Extended speed range operation of permanent magnet brushless machines using optimal phase angle control in the voltage mode operation |
| ATE410309T1 (de) * | 1999-12-24 | 2008-10-15 | Seiko Epson Corp | Vorrichtung und verfahren zur motorsteuerung |
| JP2003530804A (ja) | 2000-04-07 | 2003-10-14 | デルファイ・テクノロジーズ・インコーポレーテッド | 電動式パワーステアリングシステムの電圧制御されたブラシレスモータの減衰方法 |
| US6671459B1 (en) * | 2000-06-30 | 2003-12-30 | General Electric Company | DC motor control method and apparatus |
| US6498451B1 (en) | 2000-09-06 | 2002-12-24 | Delphi Technologies, Inc. | Torque ripple free electric power steering |
| US6566829B1 (en) | 2000-09-07 | 2003-05-20 | Delphi Technologies, Inc. | Method and apparatus for torque control of a machine |
| EP1399348B1 (en) * | 2001-06-08 | 2009-08-19 | Delphi Technologies, Inc. | Velocity compensation control for electric steering systems |
| US6900607B2 (en) * | 2001-08-17 | 2005-05-31 | Delphi Technologies, Inc. | Combined feedforward and feedback parameter estimation for electric machines |
| US20030076064A1 (en) * | 2001-08-17 | 2003-04-24 | Kleinau Julie A. | Feedforward parameter estimation for electric machines |
| US7071649B2 (en) | 2001-08-17 | 2006-07-04 | Delphi Technologies, Inc. | Active temperature estimation for electric machines |
| US7199549B2 (en) * | 2001-08-17 | 2007-04-03 | Delphi Technologies, Inc | Feedback parameter estimation for electric machines |
| CN102085764B (zh) * | 2001-08-22 | 2012-09-19 | 兄弟工业株式会社 | 图像形成装置及其控制方法 |
| US7585123B2 (en) | 2001-08-22 | 2009-09-08 | Brother Kogyo Kabushiki Kaisha | Image forming apparatus |
| DE60230703D1 (de) * | 2001-08-27 | 2009-02-26 | Canon Kk | Tintenstrahldruckvorrichtung und Tintenstrahldruckverfahren |
| US7576506B2 (en) * | 2001-12-11 | 2009-08-18 | Delphi Technologies, Inc. | Feedforward parameter estimation for electric machines |
| KR100457521B1 (ko) * | 2002-06-04 | 2004-11-17 | 삼성전자주식회사 | 회전 위치 제어 방법 및 장치 |
| US7157878B2 (en) * | 2002-11-19 | 2007-01-02 | Delphi Technologies, Inc. | Transient compensation voltage estimation for feedforward sinusoidal brushless motor control |
| US6873129B1 (en) | 2003-12-16 | 2005-03-29 | Lexmark International Inc. | Method of controlling rotational velocity of a rotatable member during encoder initialization for an imaging apparatus |
| US6935795B1 (en) * | 2004-03-17 | 2005-08-30 | Lexmark International, Inc. | Method for reducing the effects of printhead carrier disturbance during printing with an imaging apparatus |
| TWI252809B (en) * | 2004-05-05 | 2006-04-11 | Bobst Sa | Method and device for initial adjustment of the register of the engraved cylinders of a rotary multicolour press |
| JP4565629B2 (ja) * | 2004-12-10 | 2010-10-20 | キヤノン株式会社 | 記録装置 |
| US20080024028A1 (en) * | 2006-07-27 | 2008-01-31 | Islam Mohammad S | Permanent magnet electric motor |
| US7549504B2 (en) * | 2006-07-28 | 2009-06-23 | Delphi Technologies, Inc. | Quadrant dependent active damping for electric power steering |
| US7543679B2 (en) * | 2006-07-28 | 2009-06-09 | Delphi Technologies, Inc. | Compensation of periodic sensor errors in electric power steering systems |
| US7725227B2 (en) | 2006-12-15 | 2010-05-25 | Gm Global Technology Operations, Inc. | Method, system, and apparatus for providing enhanced steering pull compensation |
| JP5000325B2 (ja) * | 2007-02-09 | 2012-08-15 | 東芝機械株式会社 | 位相差検出装置及び回転位置検出装置 |
| JP2008241345A (ja) | 2007-03-26 | 2008-10-09 | Toshiba Mach Co Ltd | 位相検出装置及び位置検出装置 |
| JP5032909B2 (ja) * | 2007-07-27 | 2012-09-26 | 株式会社リコー | 画像形成装置、画像形成システム、画像形成方法、搬送不良検出プログラム、及びこれを格納した情報記録媒体 |
| WO2014126112A1 (ja) * | 2013-02-13 | 2014-08-21 | 日本電産サンキョー株式会社 | 産業用ロボットおよび産業用ロボットの制御方法 |
| CN104129078B (zh) * | 2014-08-07 | 2017-11-21 | 北京汇天威科技有限公司 | 3d打印机外部接料装置及实现方法 |
| JP6469171B2 (ja) * | 2017-06-14 | 2019-02-13 | ファナック株式会社 | 電動機の制御装置 |
| US11511536B2 (en) | 2017-11-27 | 2022-11-29 | Landa Corporation Ltd. | Calibration of runout error in a digital printing system |
| CN112319065B (zh) * | 2018-10-26 | 2022-05-27 | 深圳市汉森软件有限公司 | 喷墨打印机小车防撞方法、装置及计算机可读存储介质 |
| CN109760432B (zh) * | 2019-01-08 | 2021-04-13 | 森大(深圳)技术有限公司 | 打印机异常自动检测方法、装置、设备及存储介质 |
| WO2021033121A1 (en) | 2019-08-20 | 2021-02-25 | Landa Corporation Ltd. | Apparatus employing pressurized fluid-based dancer for controlling tension applied to a flexible member |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4216415A (en) * | 1977-05-31 | 1980-08-05 | Nippon Electric Co., Ltd. | Position control system comprising a digital algebraic adder circuit |
| US4457639A (en) * | 1981-10-07 | 1984-07-03 | Epson Corporation | Motor control for printer carriage |
| US4463435A (en) * | 1981-10-16 | 1984-07-31 | International Business Machines Corporation | Printer control system with controlled acceleration and deceleration |
| EP0043733B1 (en) * | 1980-07-07 | 1986-03-12 | Xerox Corporation | Apparatus for controlling the movement of a movable element |
| JPH01238974A (ja) * | 1988-03-18 | 1989-09-25 | Nec Corp | 印字ヘッドキャリアの移動制御装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59222089A (ja) * | 1983-05-31 | 1984-12-13 | Sharp Corp | 直流モ−タの位置決め制御システム |
| SE8306523L (sv) * | 1983-11-25 | 1985-05-26 | Ericsson Telefon Ab L M | Sett att styra en typskrivare |
| JPH0614800B2 (ja) * | 1984-03-26 | 1994-02-23 | キヤノン株式会社 | キャリッジ駆動用電動機の制御システム |
| US4815063A (en) * | 1985-09-13 | 1989-03-21 | Yamaha Corporation | Disc motor control circuit for controlling the rotation of a disc in a disc playing device |
| JPS6294249A (ja) * | 1985-10-17 | 1987-04-30 | Fanuc Ltd | 速度制御方式 |
| US4777609A (en) * | 1985-12-11 | 1988-10-11 | International Business Machines Corporation | Print head motor control system having steady state velocity compensation |
| JPS6311374A (ja) * | 1986-03-07 | 1988-01-18 | Seiko Epson Corp | プリンタのキヤリツジ制御方法 |
| US4928050A (en) * | 1988-01-29 | 1990-05-22 | Canon Kabushiki Kaisha | Recorder |
| JPH01234280A (ja) * | 1988-03-14 | 1989-09-19 | Nec Corp | 印字ヘッドキャリアの移動制御方法およびその装置 |
| SG47894A1 (en) * | 1989-10-03 | 1998-04-17 | Seiko Epson Corp | Printer carriage control device |
| US5204601A (en) * | 1989-12-01 | 1993-04-20 | Fuji Photo Film Co., Ltd. | Motor control servo system |
| US5306084A (en) * | 1990-06-15 | 1994-04-26 | Seiko Epson Corporation | Printing control system and the method |
| JP3171860B2 (ja) * | 1991-01-23 | 2001-06-04 | セイコーインスツルメンツ株式会社 | サーボ制御システム |
-
1993
- 1993-12-13 US US08/165,714 patent/US5433541A/en not_active Expired - Fee Related
- 1993-12-15 EP EP93120231A patent/EP0602628B1/en not_active Expired - Lifetime
- 1993-12-15 KR KR1019930027780A patent/KR970003659B1/ko not_active IP Right Cessation
- 1993-12-15 DE DE69325348T patent/DE69325348T2/de not_active Expired - Fee Related
- 1993-12-15 CN CN93121127A patent/CN1091693C/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4216415A (en) * | 1977-05-31 | 1980-08-05 | Nippon Electric Co., Ltd. | Position control system comprising a digital algebraic adder circuit |
| EP0043733B1 (en) * | 1980-07-07 | 1986-03-12 | Xerox Corporation | Apparatus for controlling the movement of a movable element |
| US4457639A (en) * | 1981-10-07 | 1984-07-03 | Epson Corporation | Motor control for printer carriage |
| US4463435A (en) * | 1981-10-16 | 1984-07-31 | International Business Machines Corporation | Printer control system with controlled acceleration and deceleration |
| JPH01238974A (ja) * | 1988-03-18 | 1989-09-25 | Nec Corp | 印字ヘッドキャリアの移動制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0602628B1 (en) | 1999-06-16 |
| KR970003659B1 (ko) | 1997-03-20 |
| DE69325348D1 (de) | 1999-07-22 |
| DE69325348T2 (de) | 1999-12-23 |
| EP0602628A2 (en) | 1994-06-22 |
| CN1106339A (zh) | 1995-08-09 |
| KR940013862A (ko) | 1994-07-16 |
| EP0602628A3 (en) | 1996-07-31 |
| US5433541A (en) | 1995-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1091693C (zh) | 控制打印头滑架移动的控制装置及其控制方法 | |
| CN1026936C (zh) | 电动机速度控制方法及装置 | |
| CN109849691B (zh) | 一种用于车辆的防顿挫方法和系统及车辆 | |
| US4680518A (en) | Servomotor velocity control method | |
| US7075259B2 (en) | Motor control apparatus for adjusting target rotation speed of motor in accordance with current condition of motor load | |
| KR920002347B1 (ko) | 속도 제어 시스템 | |
| CN107883990B (zh) | 电动汽车用永磁同步电机旋转变压器零位标定方法及系统 | |
| US10903768B2 (en) | Method of correcting a signal delay of a hall sensor for an air compressor motor | |
| US5532571A (en) | Control apparatus for induction motor | |
| CN1188301C (zh) | 电力铁路车辆的控制器 | |
| CN111240370B (zh) | 云台的位置校正方法、装置、系统及存储介质 | |
| CN1134897A (zh) | 车辆状态观测系统 | |
| US11056992B2 (en) | Motor controller | |
| US10209268B2 (en) | Method for determining a corrected rotational speed signal, and electric motor arrangement | |
| Bae et al. | Parallel position control scheme of permanent magnet DC motors with a low-resolution sensor | |
| JP3659827B2 (ja) | 同期電動機の制御装置 | |
| US20170016929A1 (en) | Apparatus and method for measuring motor speed | |
| CN114954882B (zh) | 一种水下机器人推进器控制系统及方法 | |
| JP3277454B2 (ja) | 検出位置補正装置及び回転速度検出装置 | |
| JP2018170945A (ja) | ブラシレスモータの制御装置 | |
| JP2627530B2 (ja) | 位置決め制御装置 | |
| CN109586622B (zh) | 基于滑模控制的水下推进器控制方法 | |
| JP3654049B2 (ja) | モータ制御装置 | |
| JPH0631499A (ja) | サーボモータ駆動方式プレス機械の駆動制御装置 | |
| KR980012819A (ko) | 회전모터의 절대각위치 산출장치 및 이를 적용한 속도제어장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |